Research areas
Adaptive XR
Context-aware mixed reality systems that adapt interfaces, environments, and behavior to users and situations.
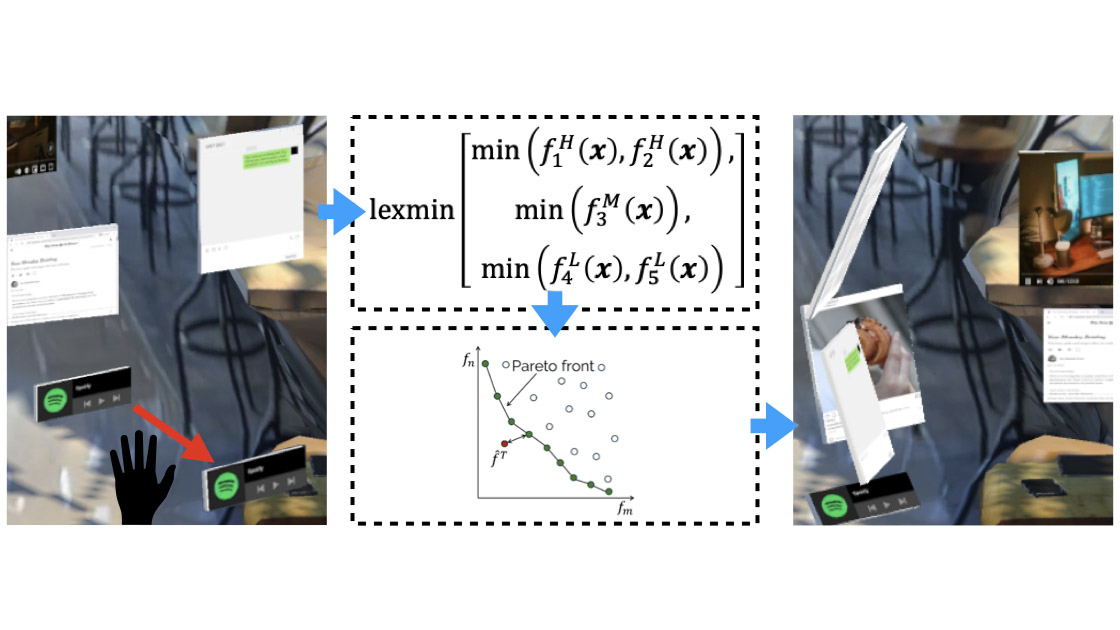
AutoOptimization
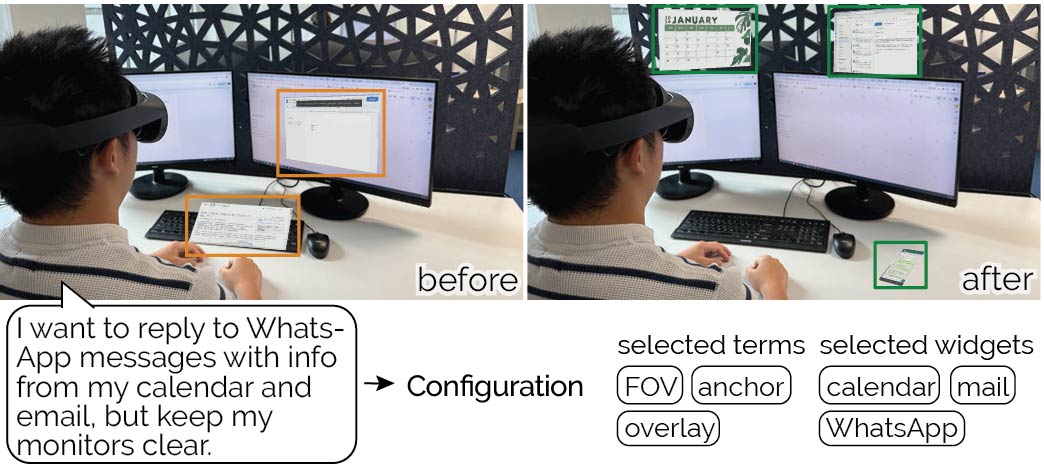
Preference-guided UI Adaptation
Efficient Visual Appearance Optimization
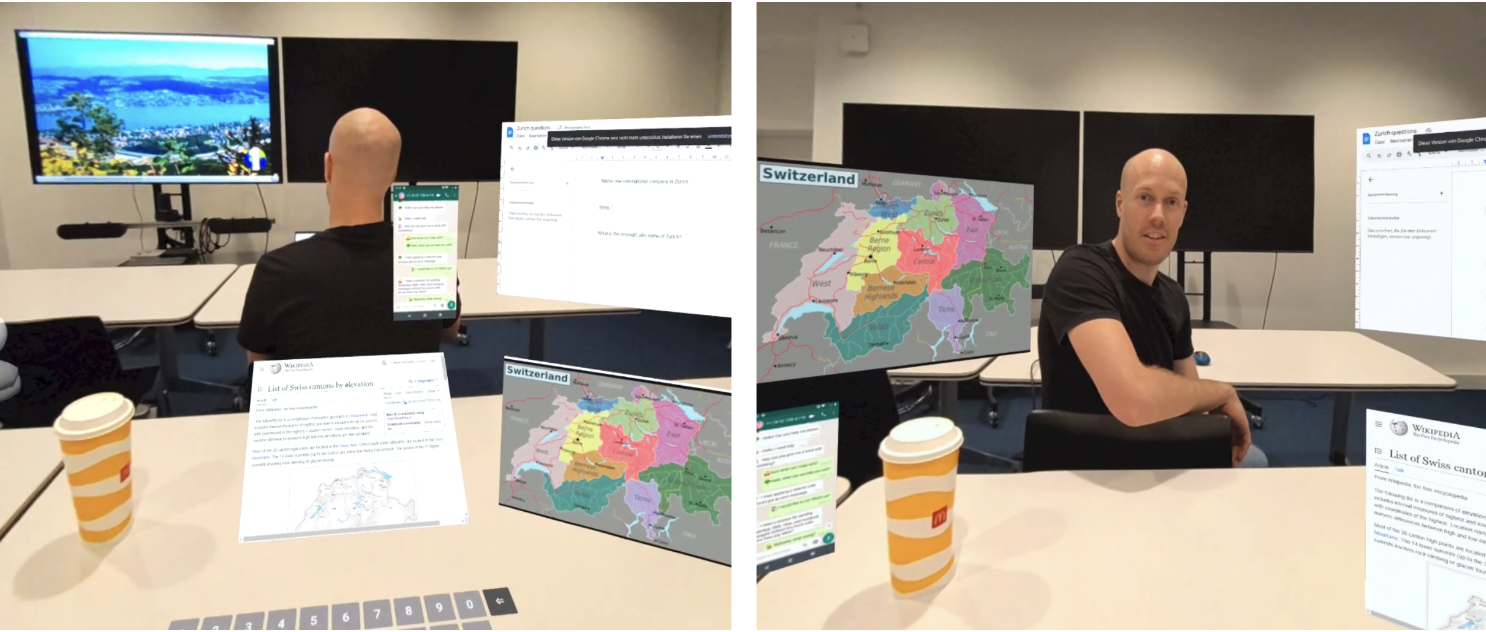
SituationAdapt
InteractionAdapt
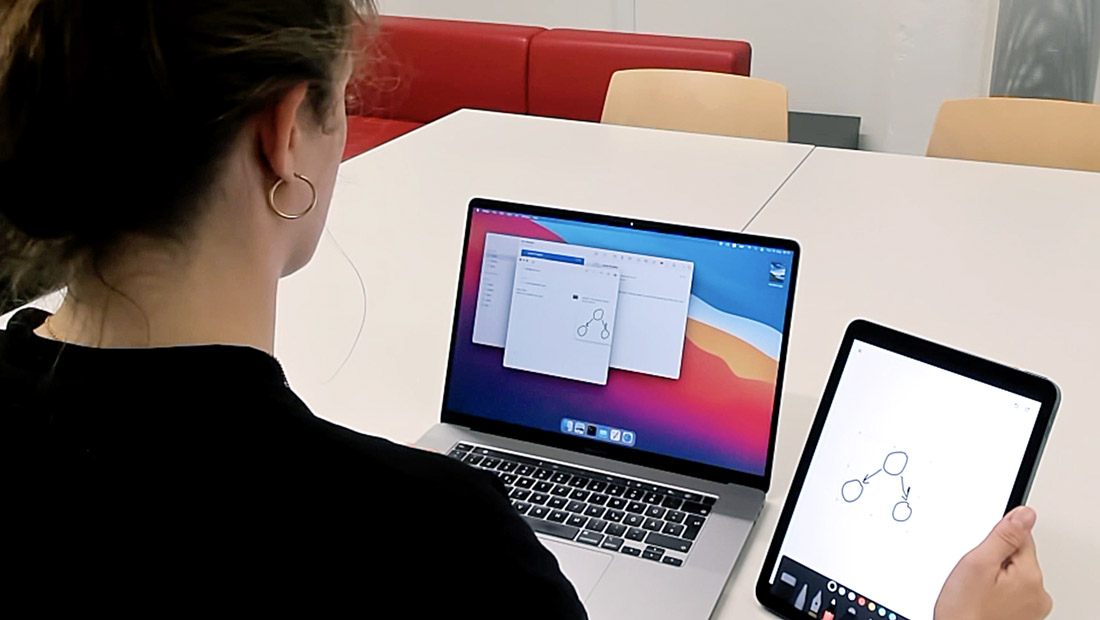
Cross-Device Shortcuts
ViGather
Reality Rifts
InfinitePaint
Asynchronous Reality
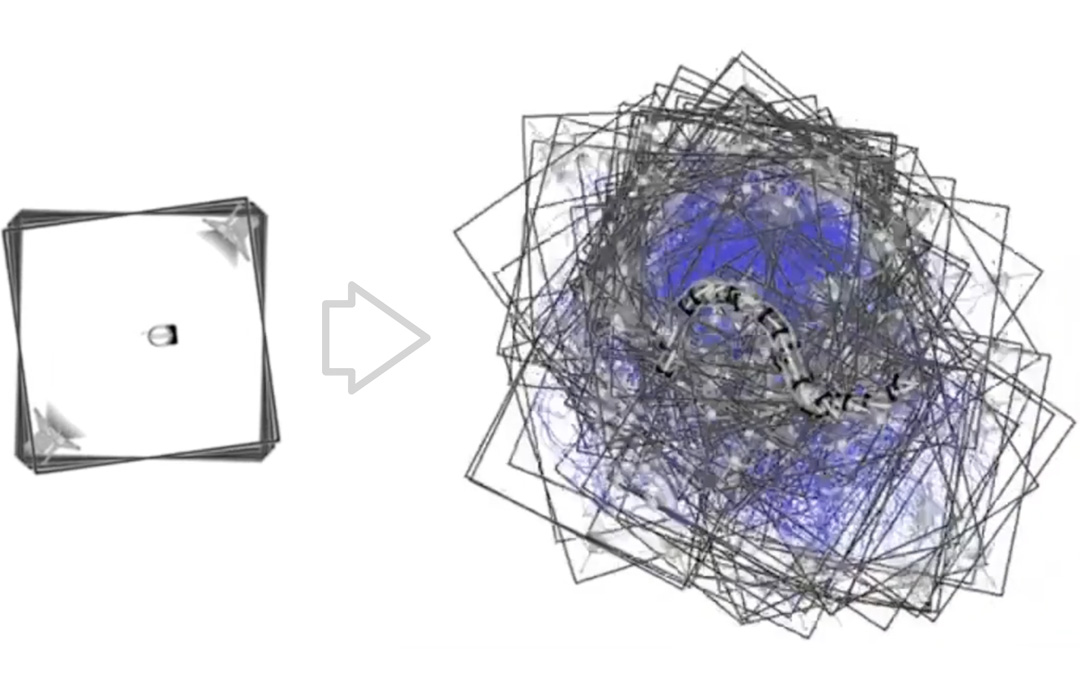
The Chaotic Behavior of Redirection
SoundsRide
AirConstellations
TransforMR
SurfaceFleet
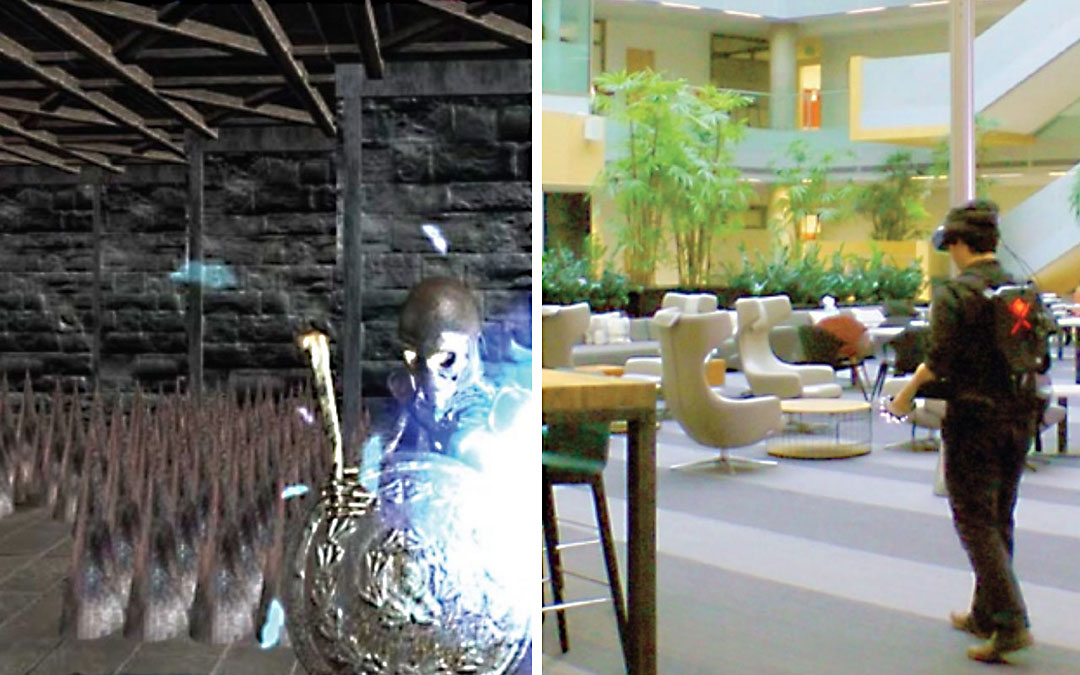
DreamWalker
Mise-Unseen
RealityCheck
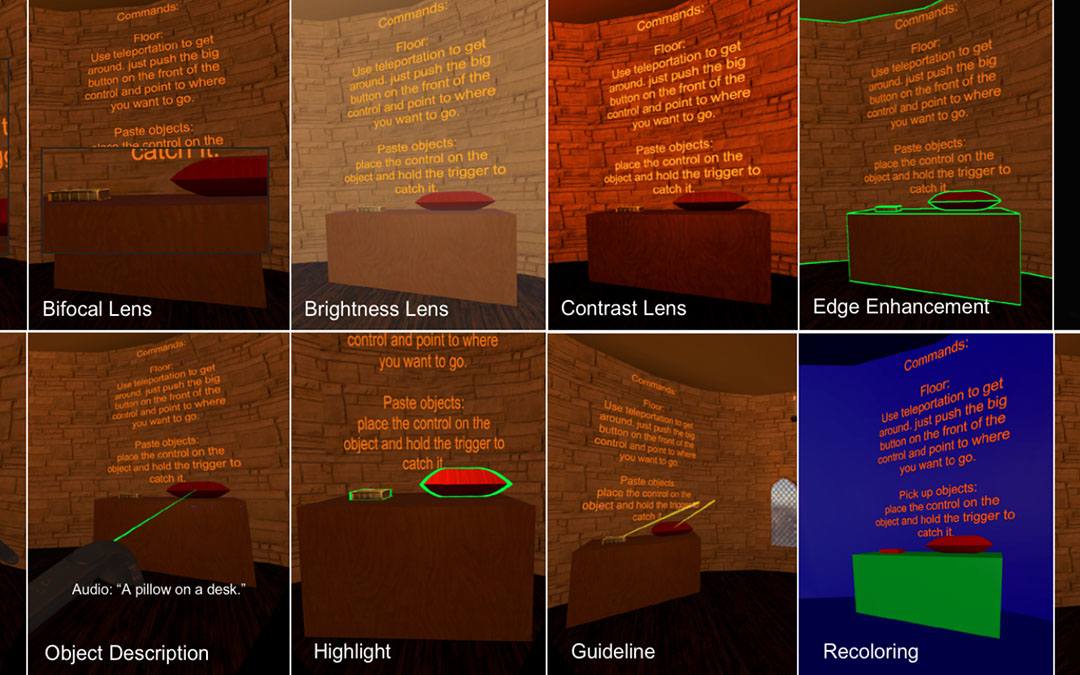
SeeingVR
VRoamer
Sparse Haptic Proxy
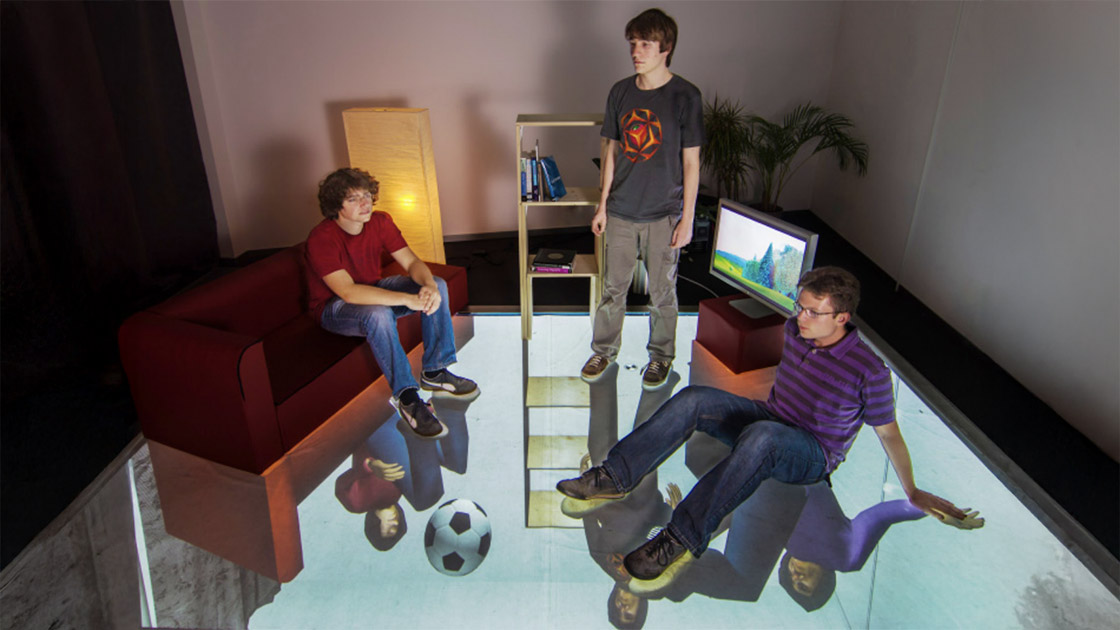
Imaginary Reality Gaming
Imaginary Devices
Egocentric perception
Perception from body-worn and first-person sensors for understanding pose, action, and interaction.
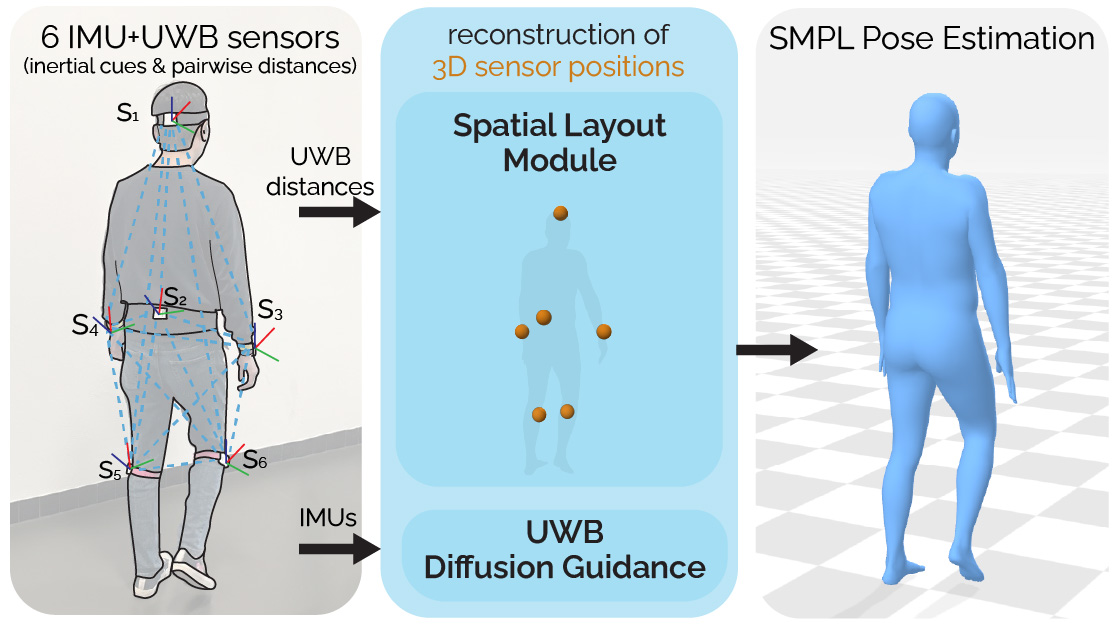
Ultra Diffusion Poser
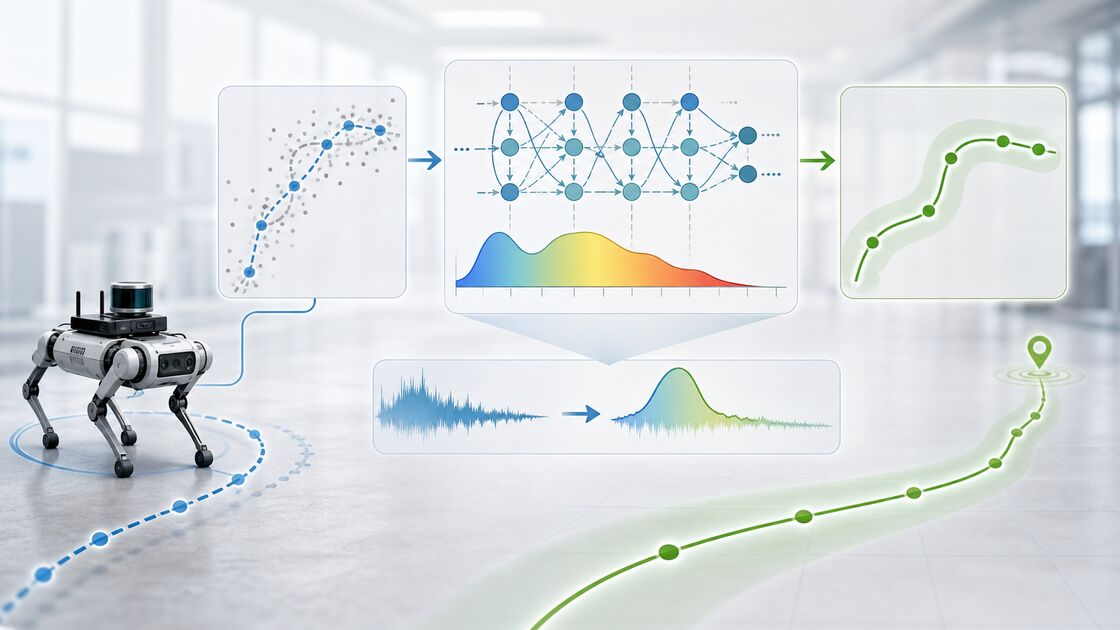
Frequency-Weighted Neural Kalman Filters
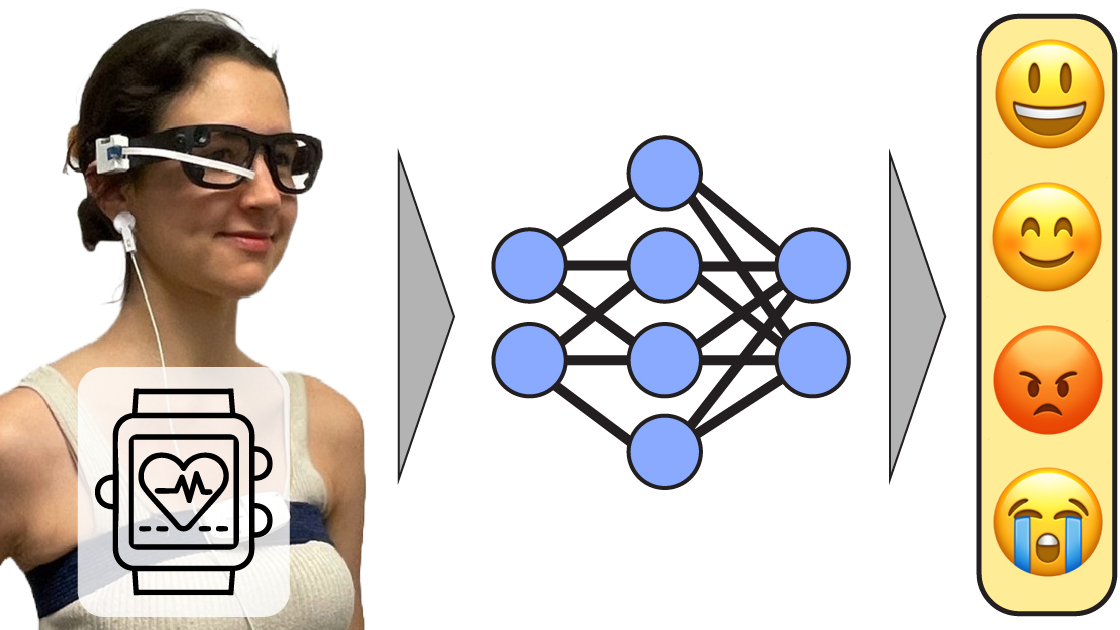
egoEMOTION
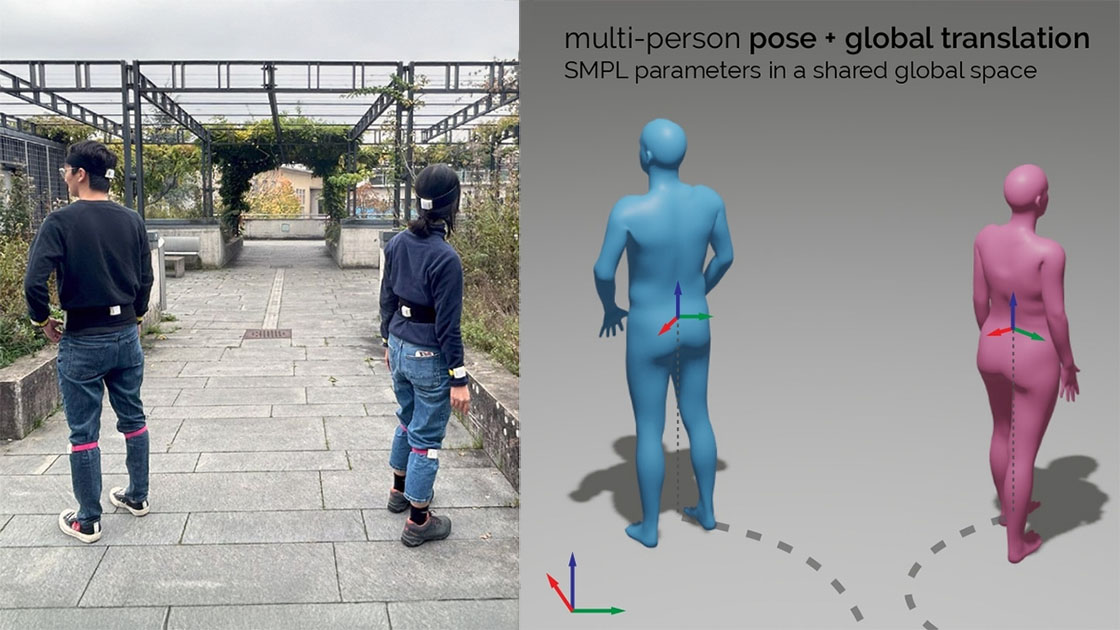
Group Inertial Poser
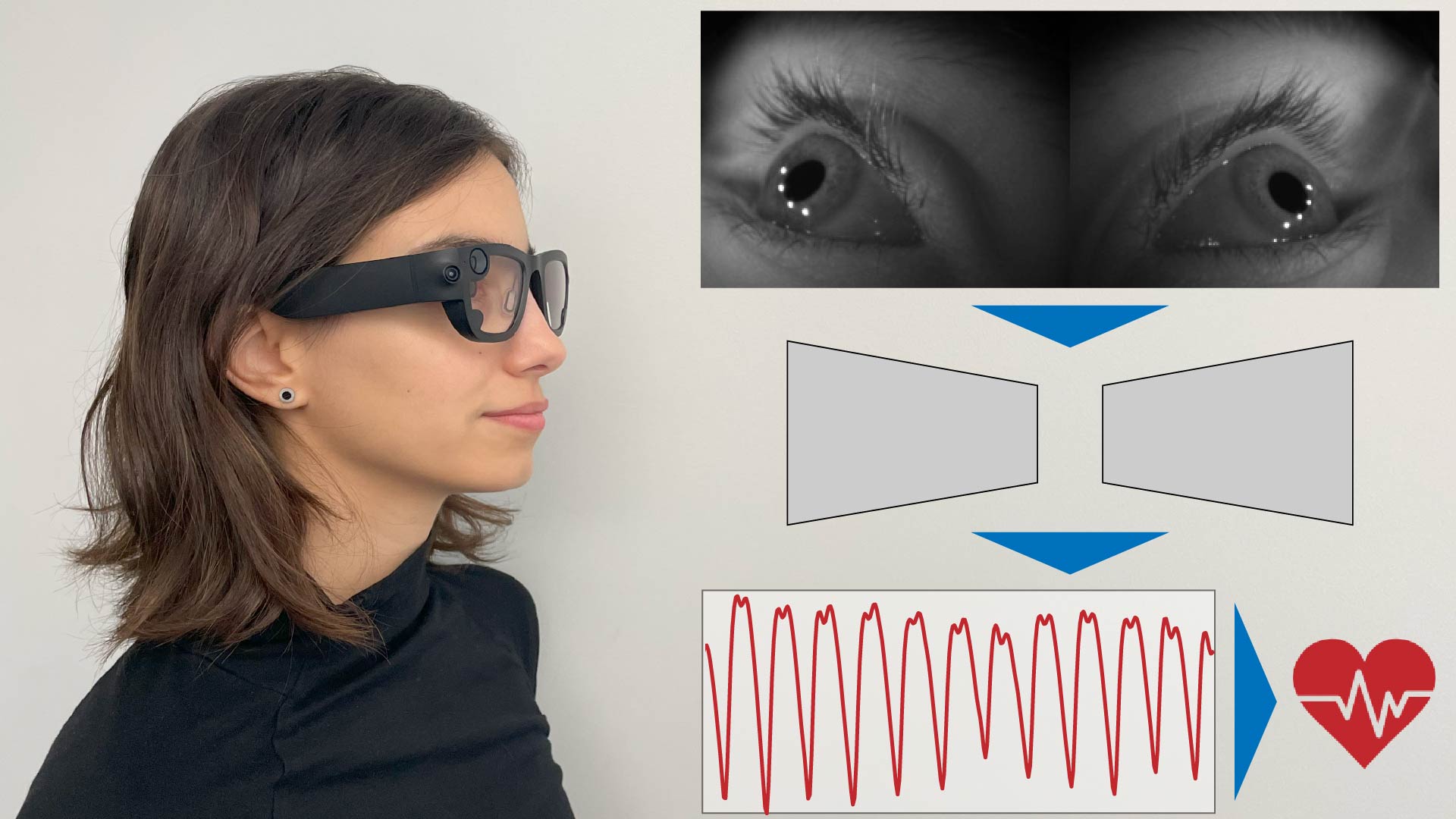
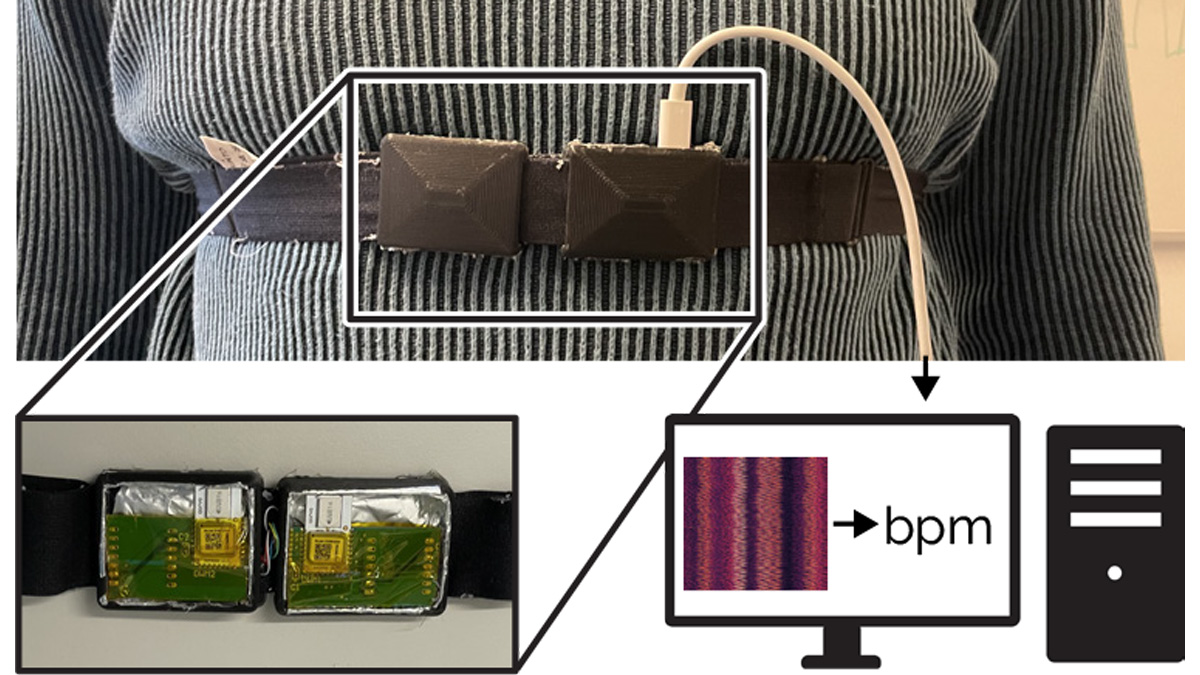
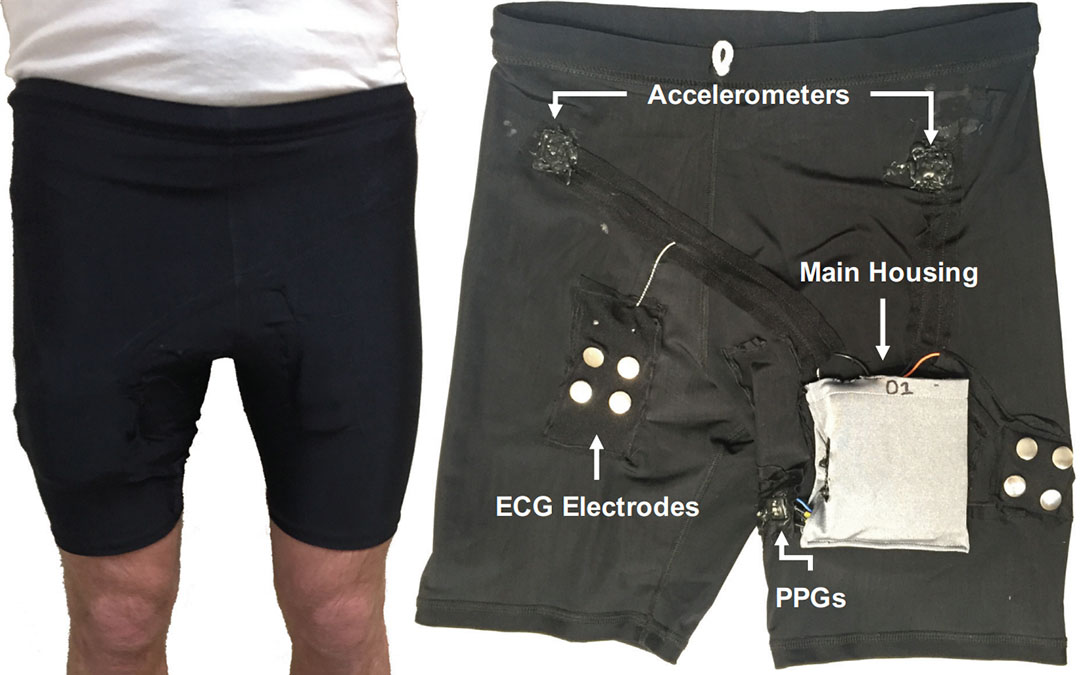
egoPPG
Garment Inertial Poser
EgoPressure
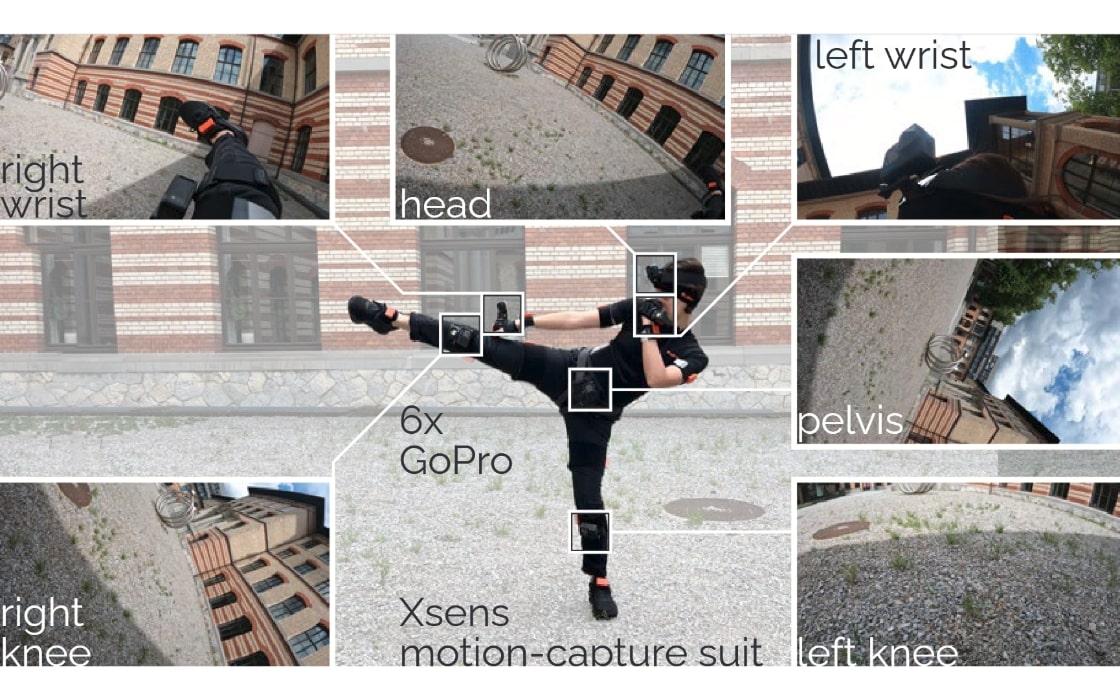
EgoSim
TouchInsight
MANIKIN
EgoPoser
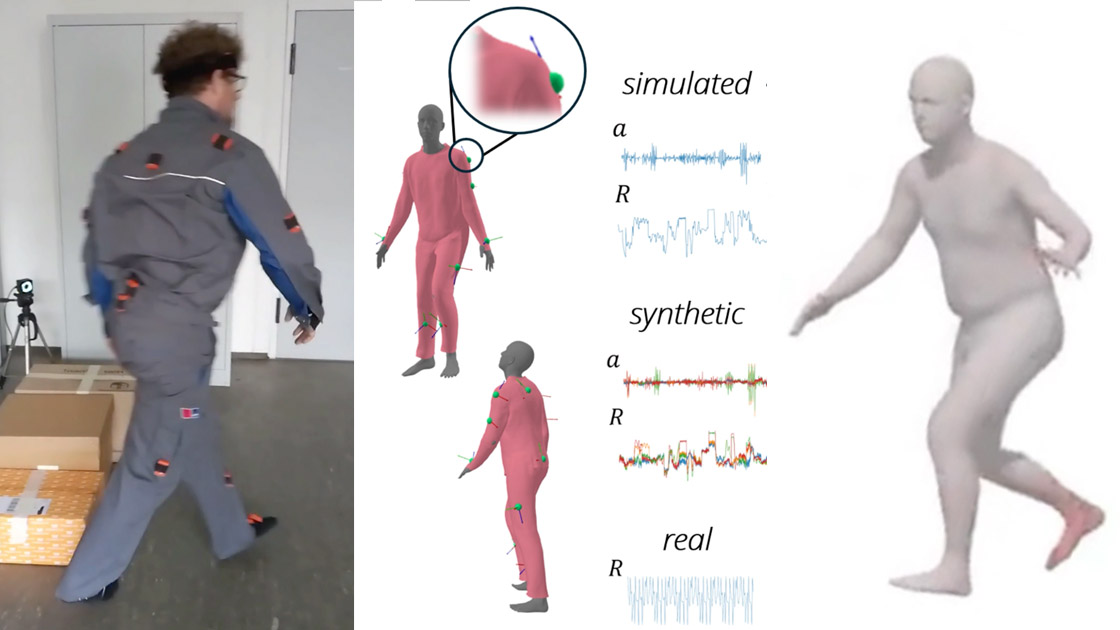
Ultra Inertial Poser
Structured Light Speckle
HOOV
AvatarPoser
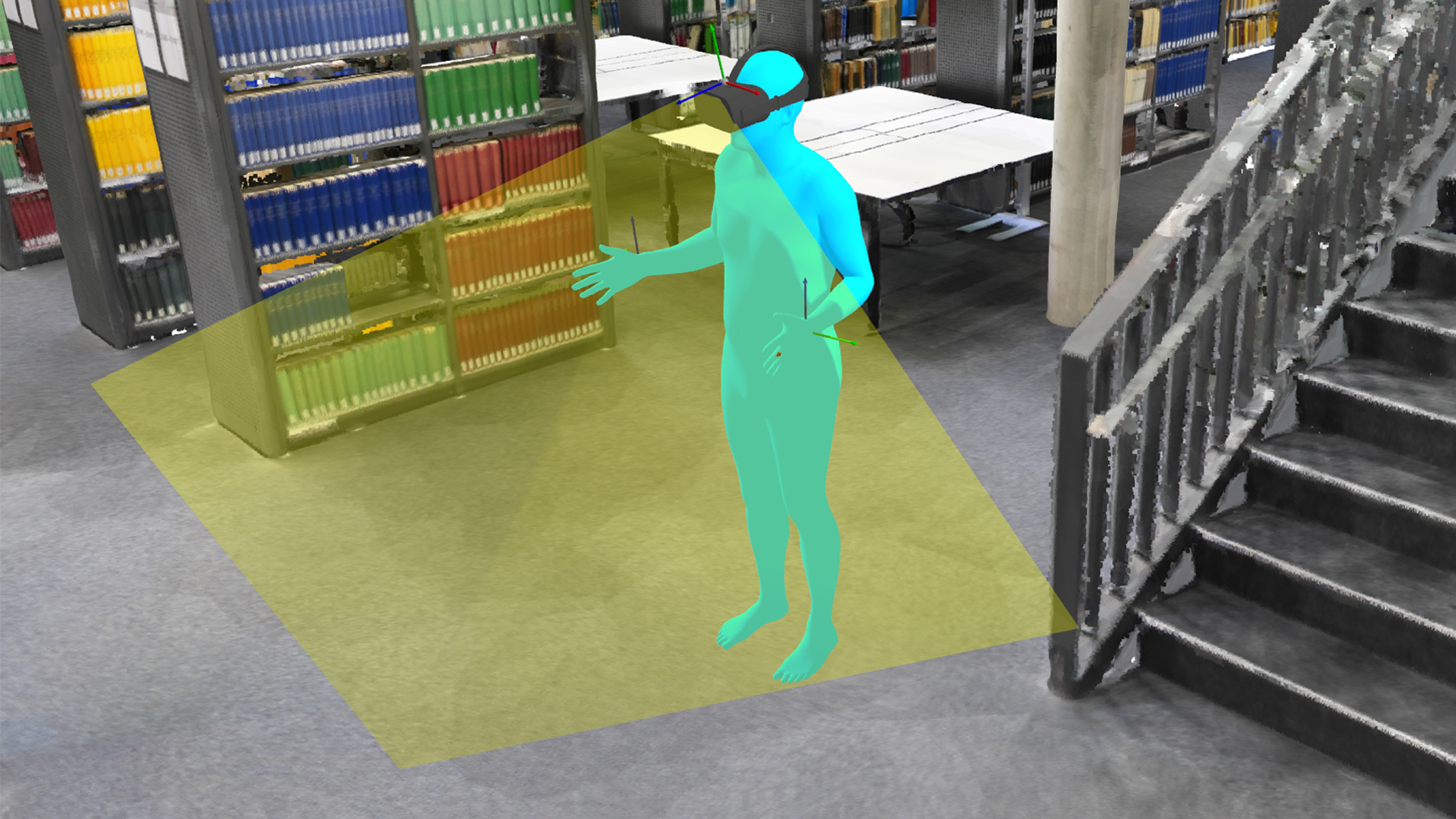
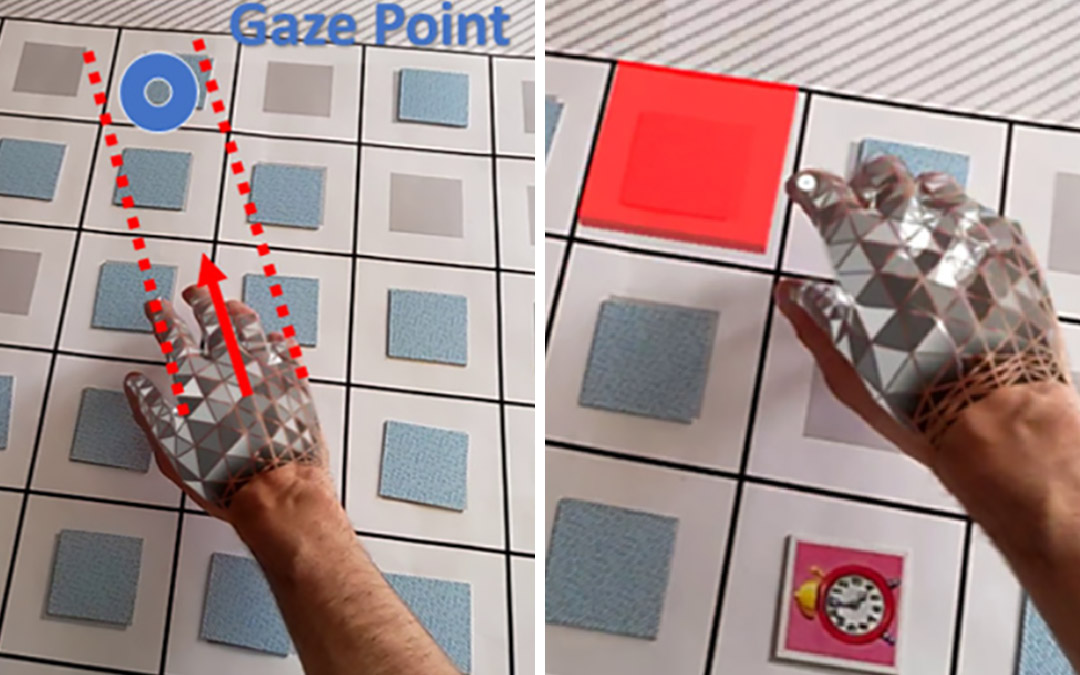
Gaze comes in handy
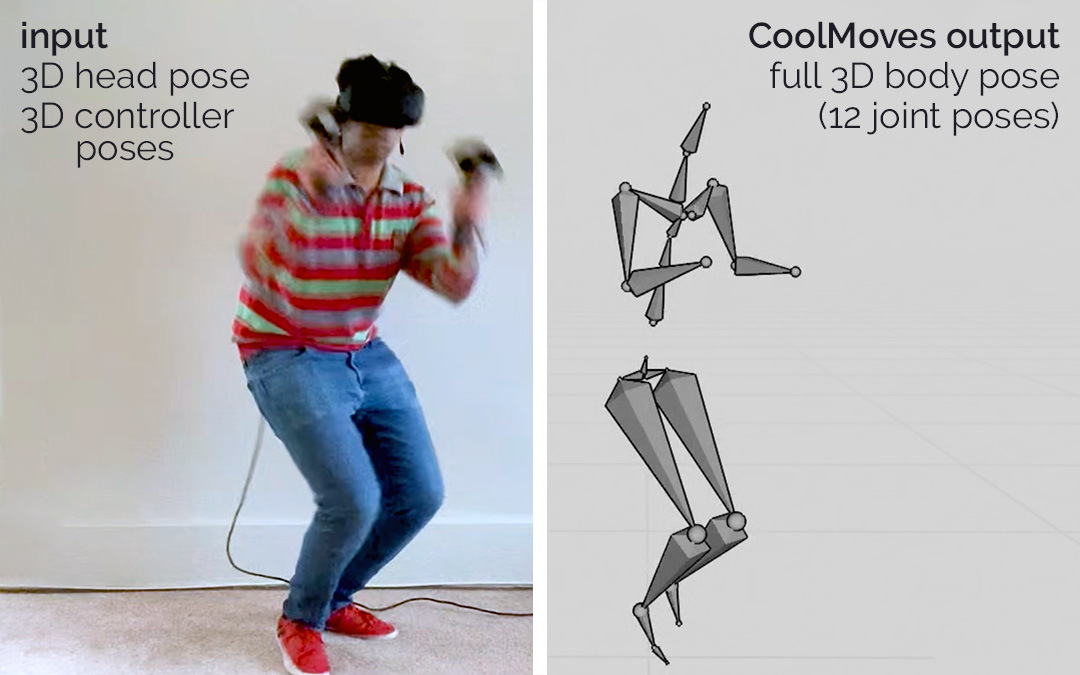
CoolMoves
Privacy-Preserving Ego-Motion Estimation
Imaginary Phone
User modeling
Models of human behavior, preference, ability, and performance used to personalize and optimize interfaces.
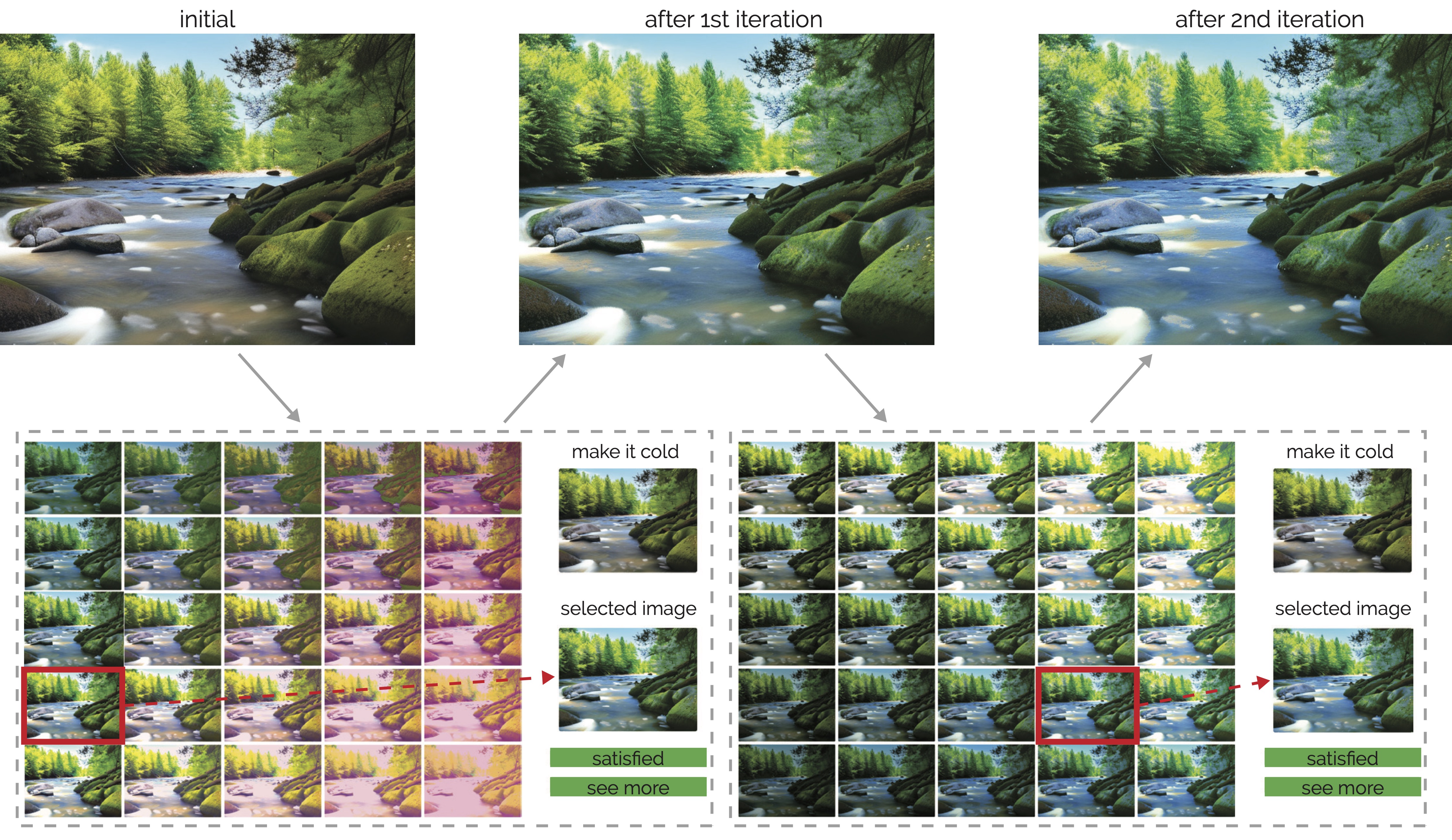
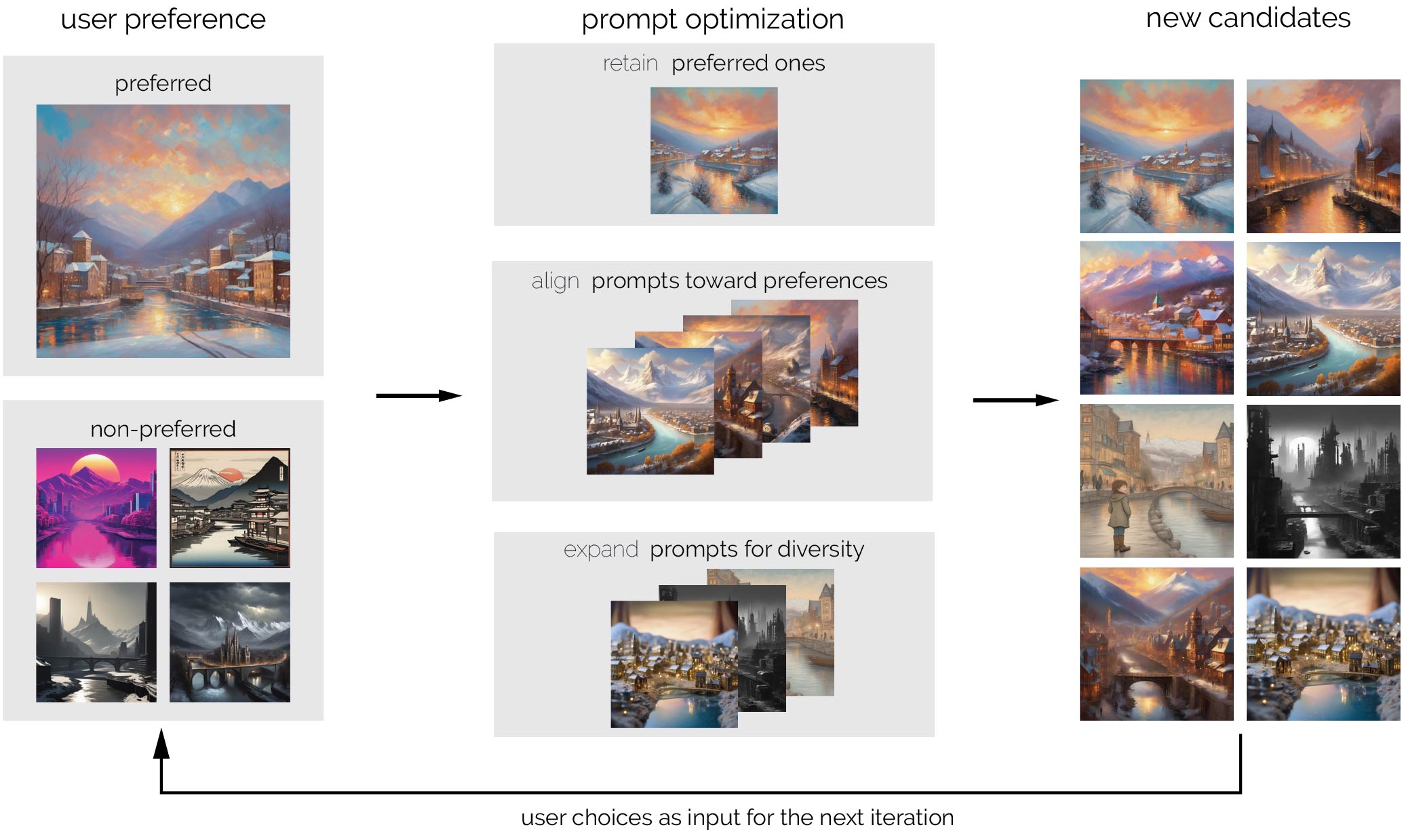
Preference-Guided Prompt Optimization
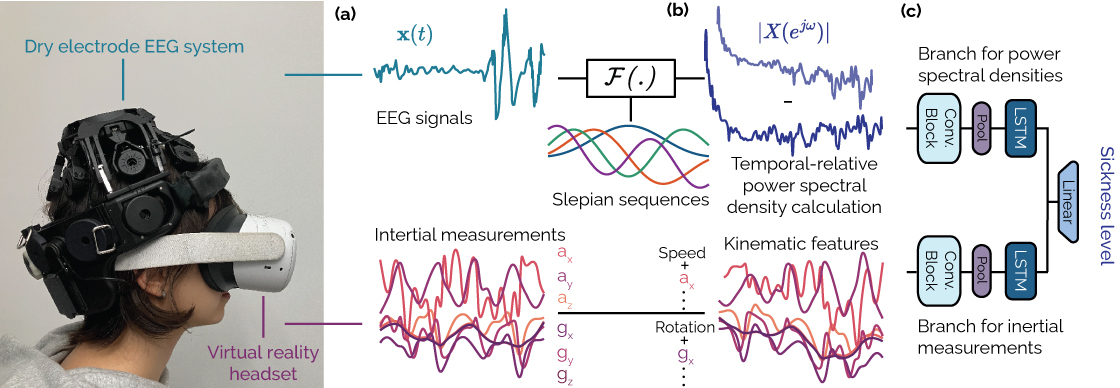
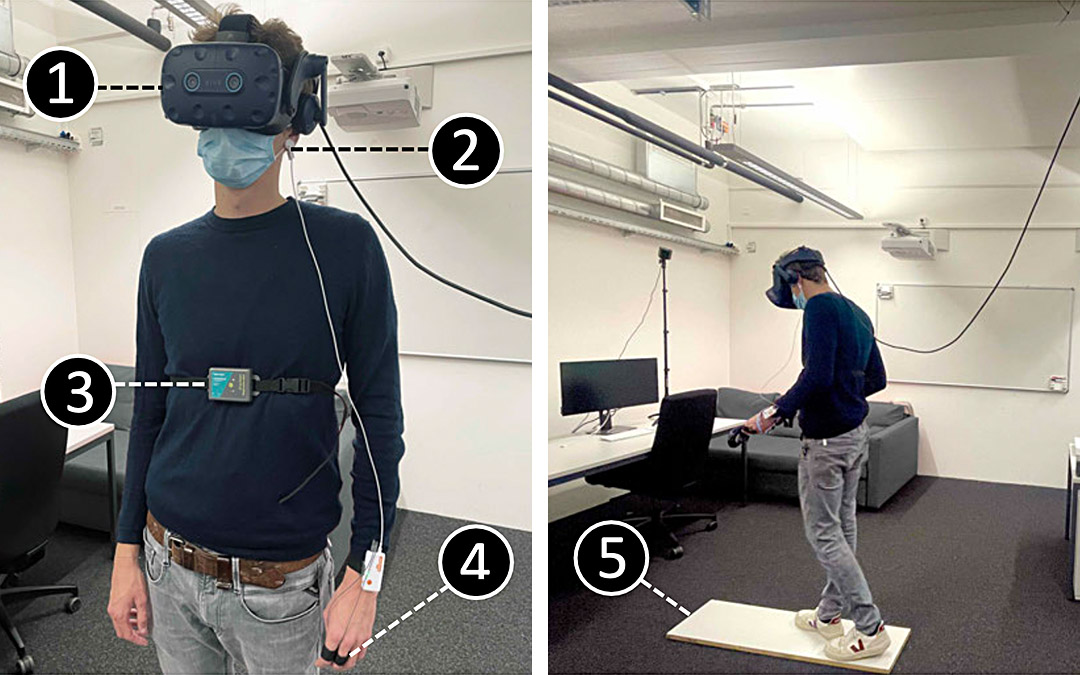
Cybersickness Detection Beyond Subjectivity
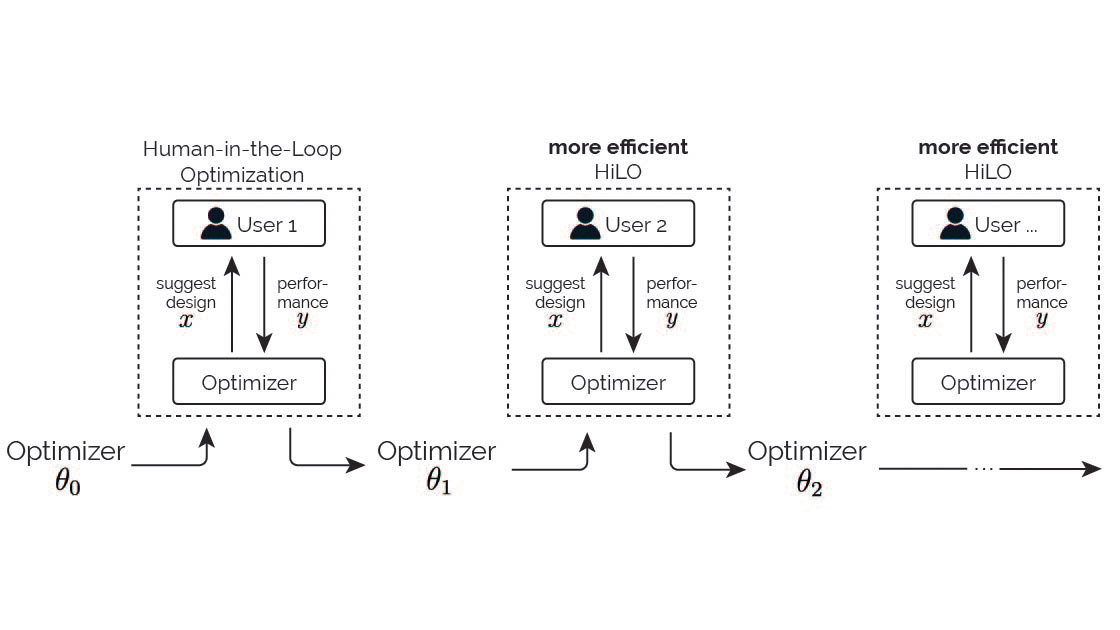
Continual Human-in-the-Loop Optimization
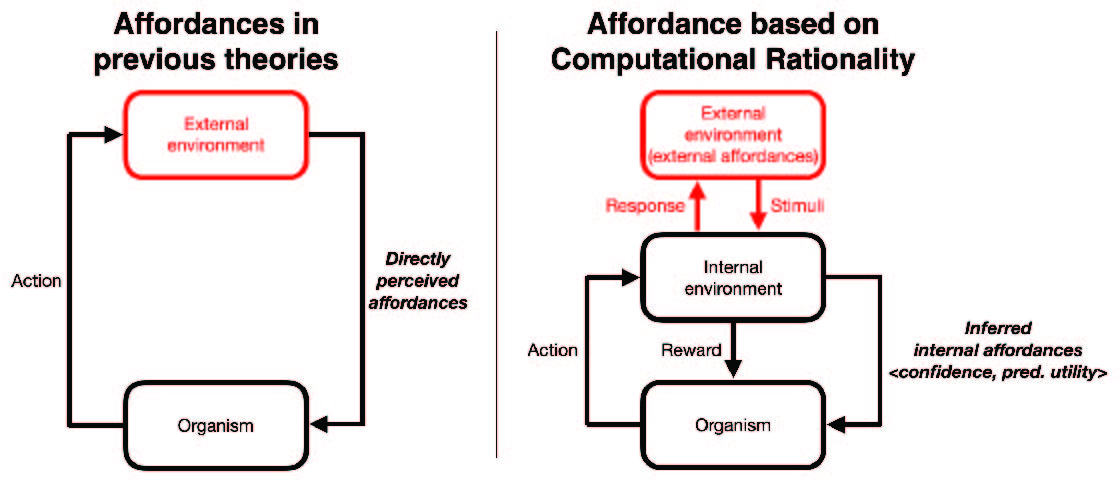
Redefining Affordance
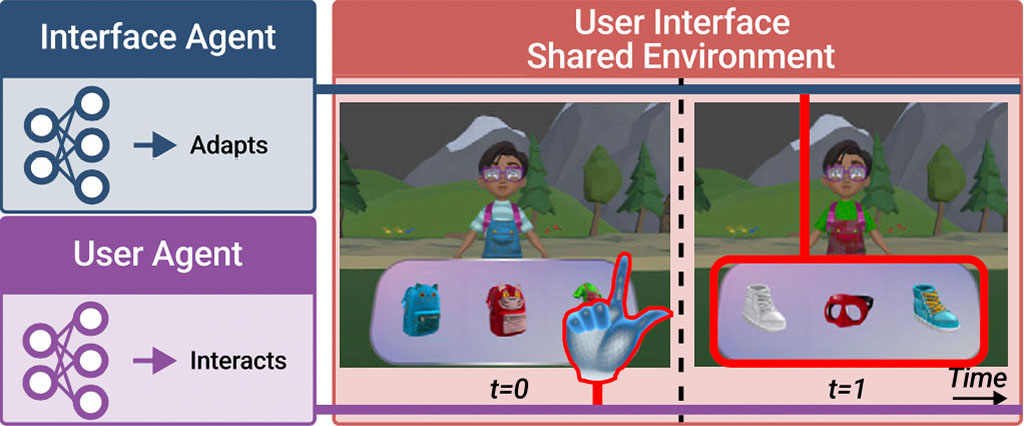
MARLUI
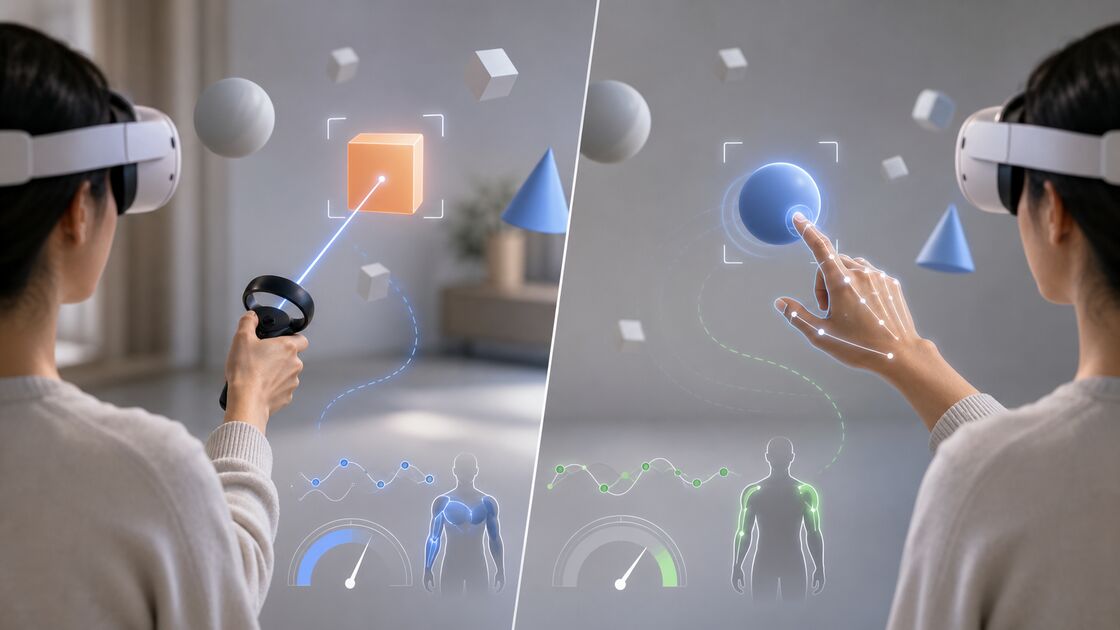
Synchronous vs. Asynchronous Reality
Controllers or Bare Hands?
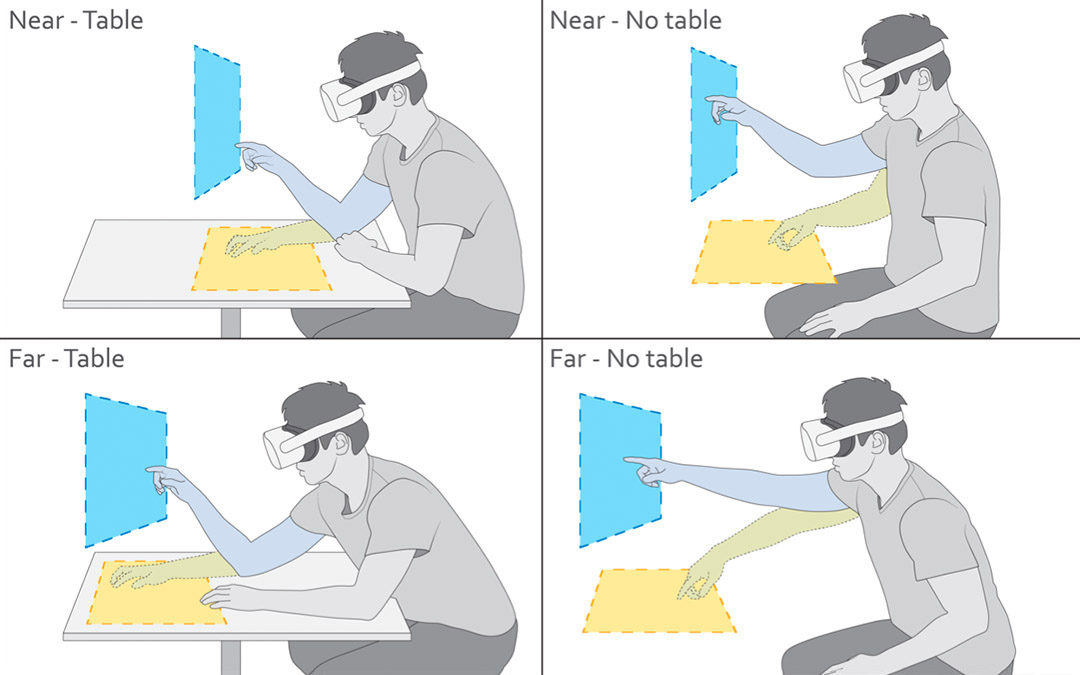
ComforTable User Interfaces
Demographic & Behavioral Correlates of Cybersickness
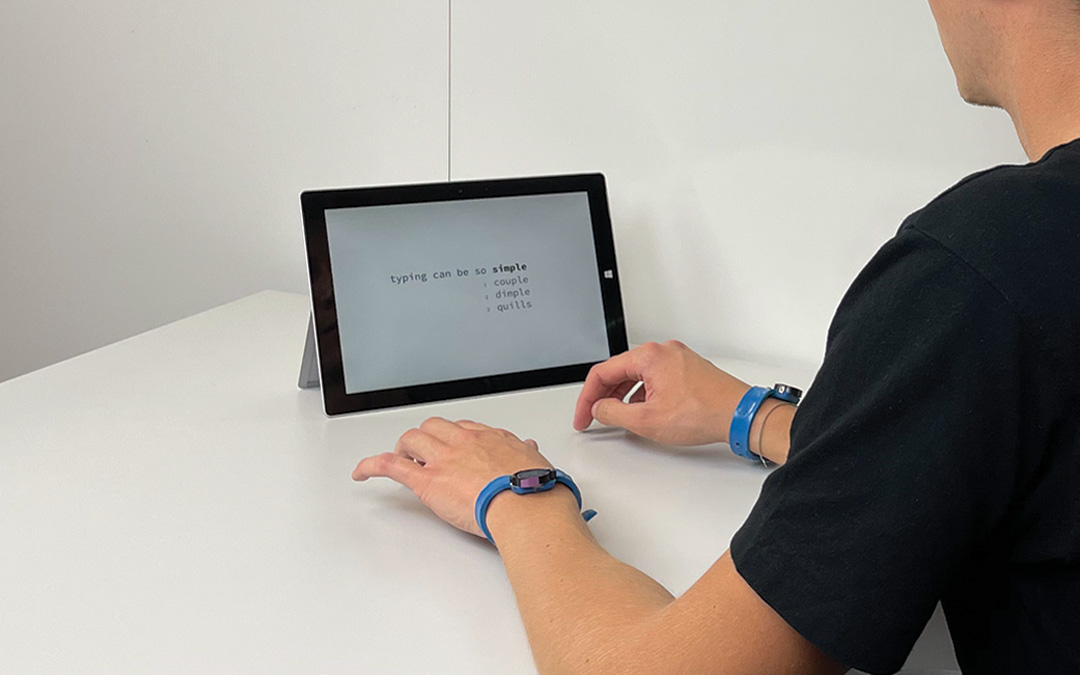
TapType
Understanding Multi-Device Usage Patterns
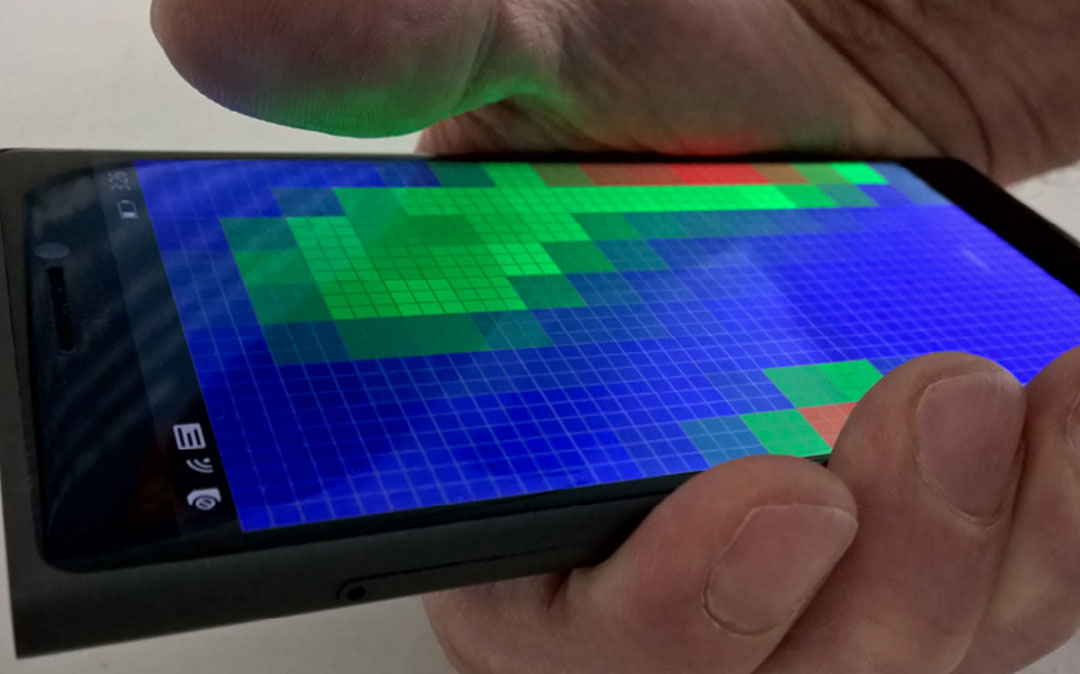
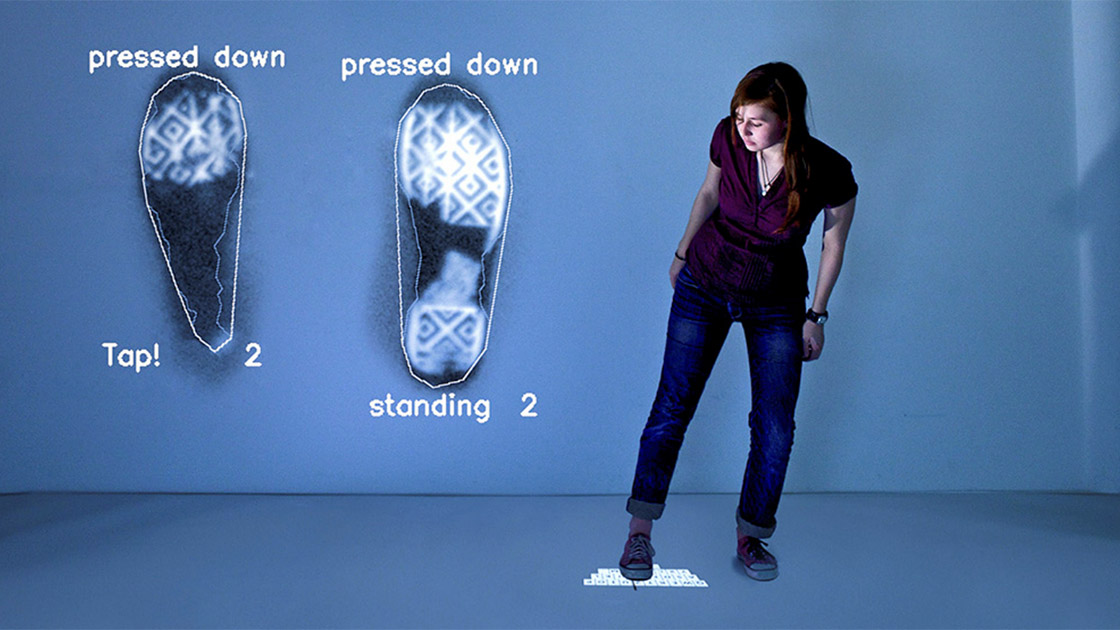
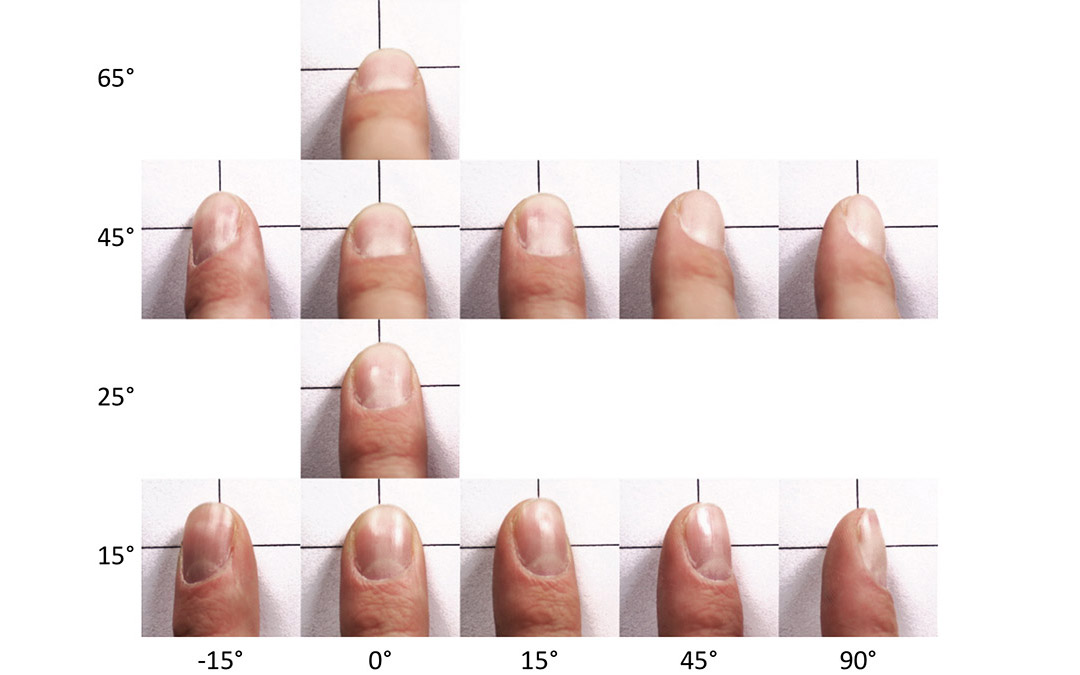
Understanding Touch
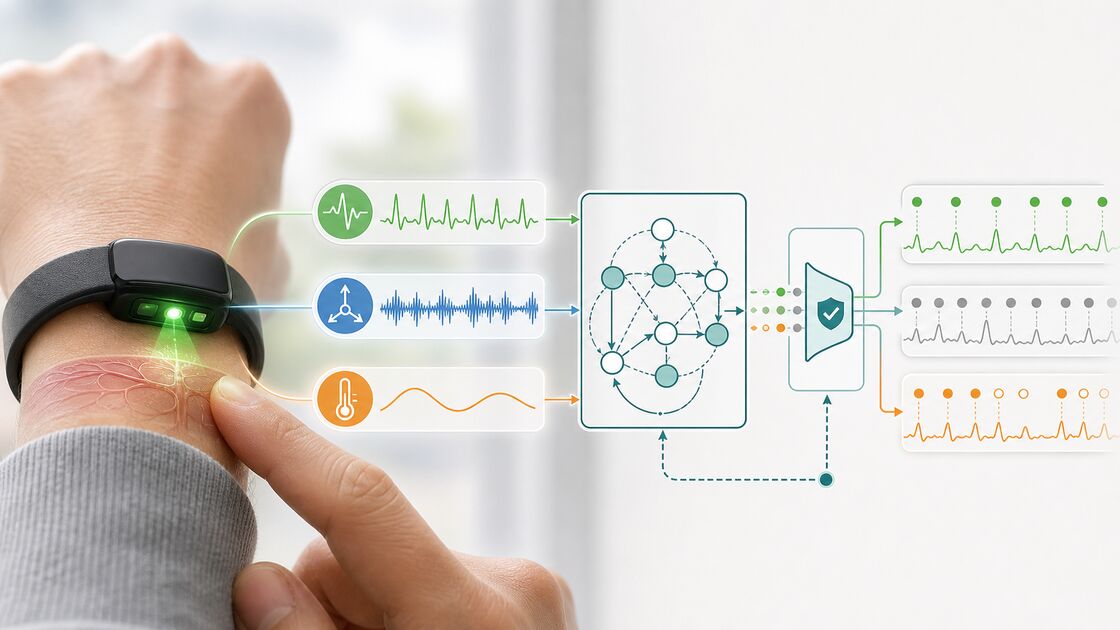
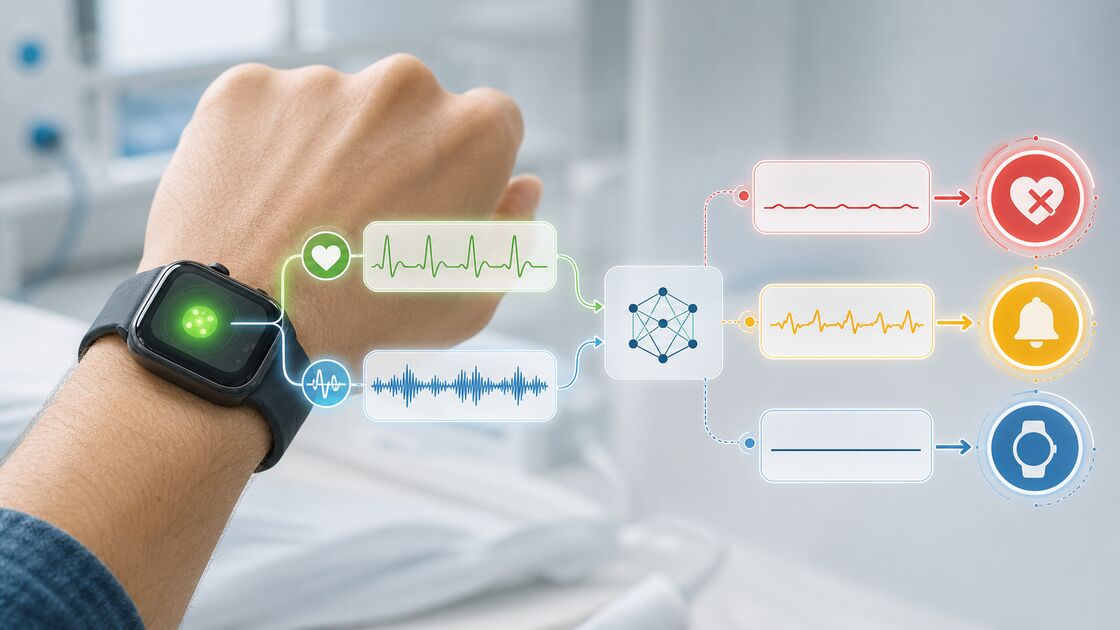
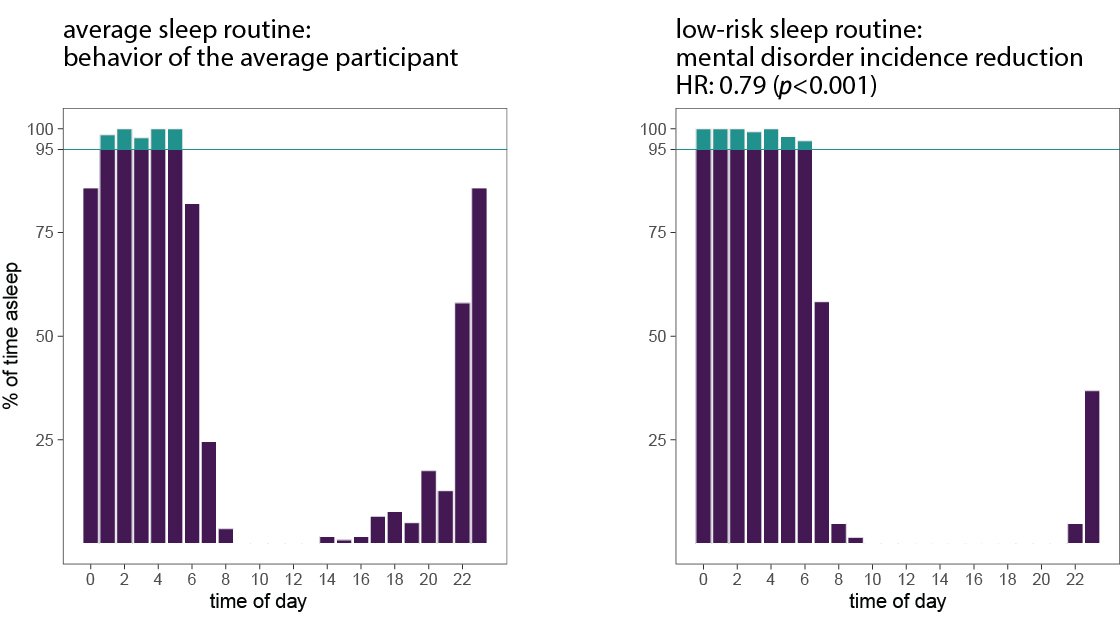
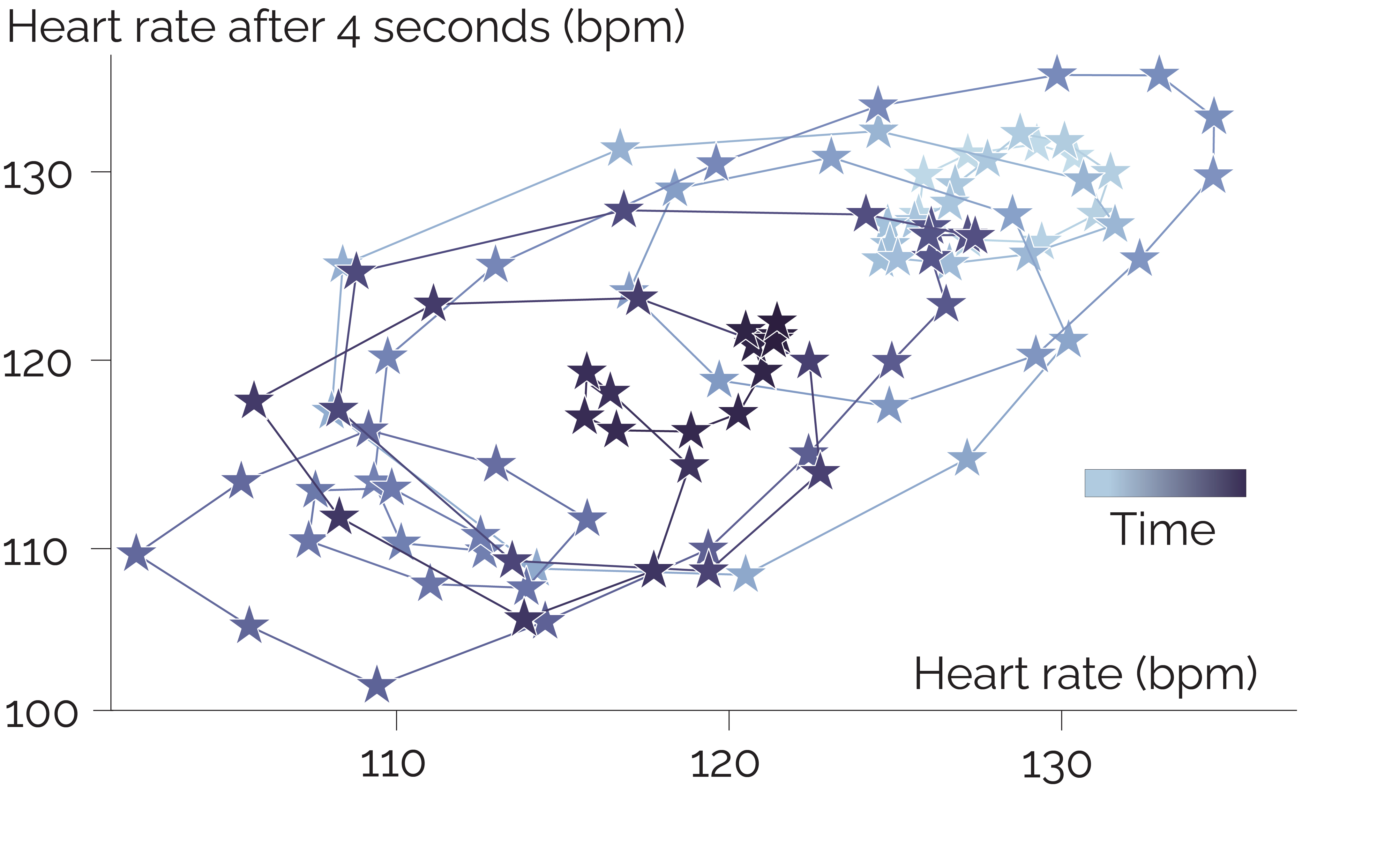
Digital biomarkers
Mobile and wearable sensing methods for measuring health, sleep, fatigue, physiology, and affective state.
Heart Rate Variability Estimation
Loss of Pulse Detection
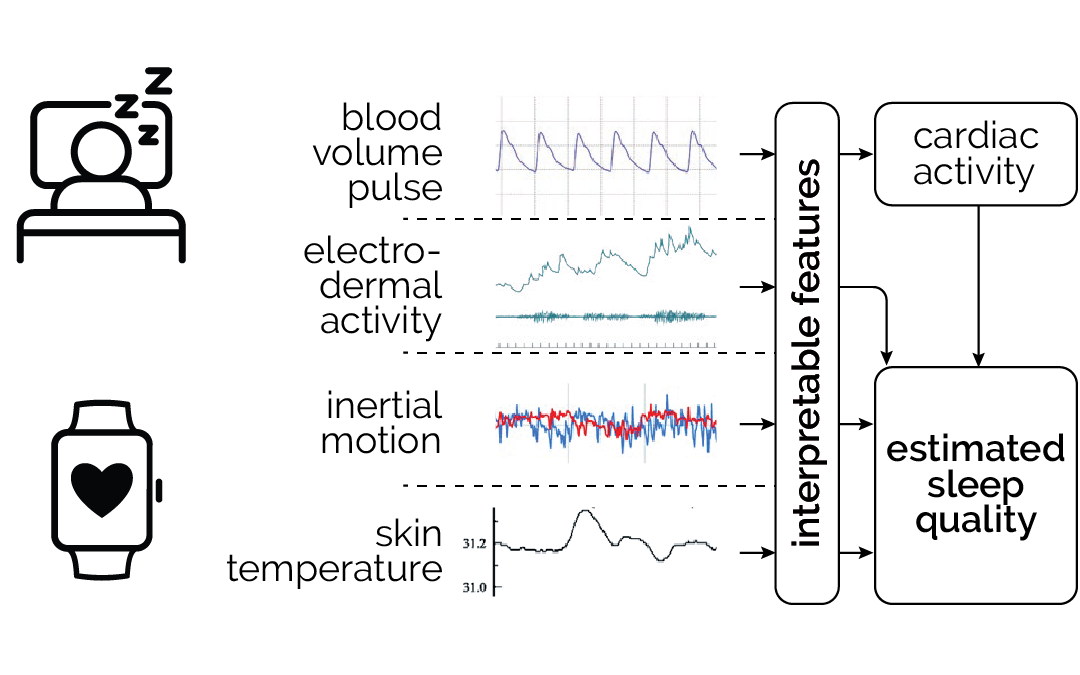
Beyond the hours slept
Learning Heart Rate Patterns
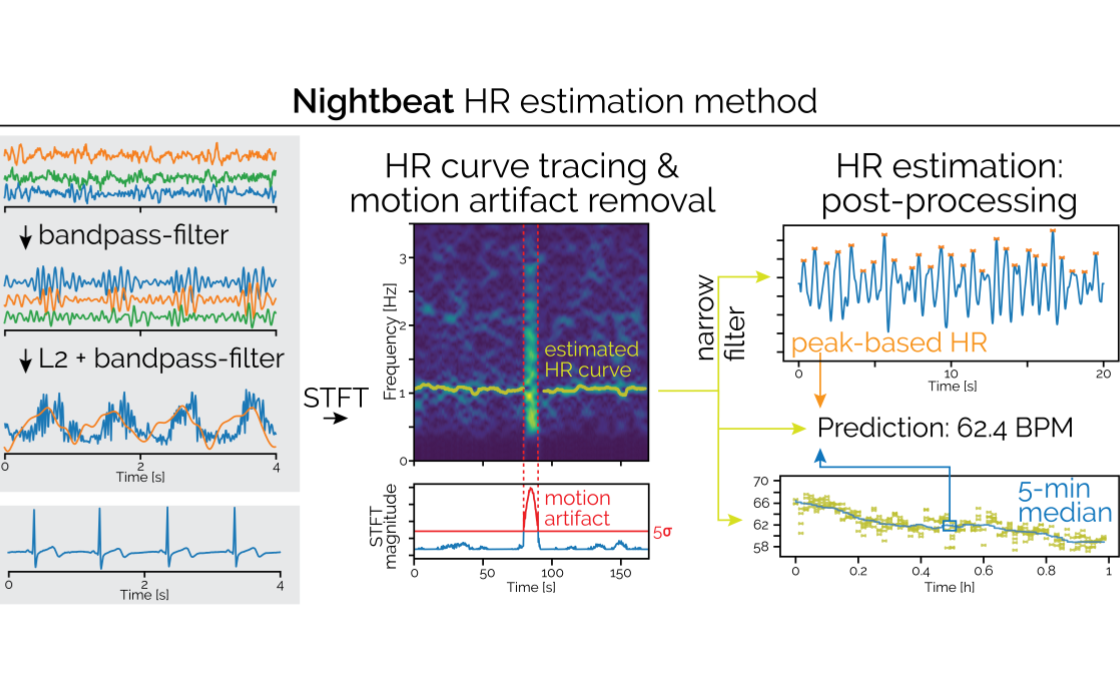
Nightbeat
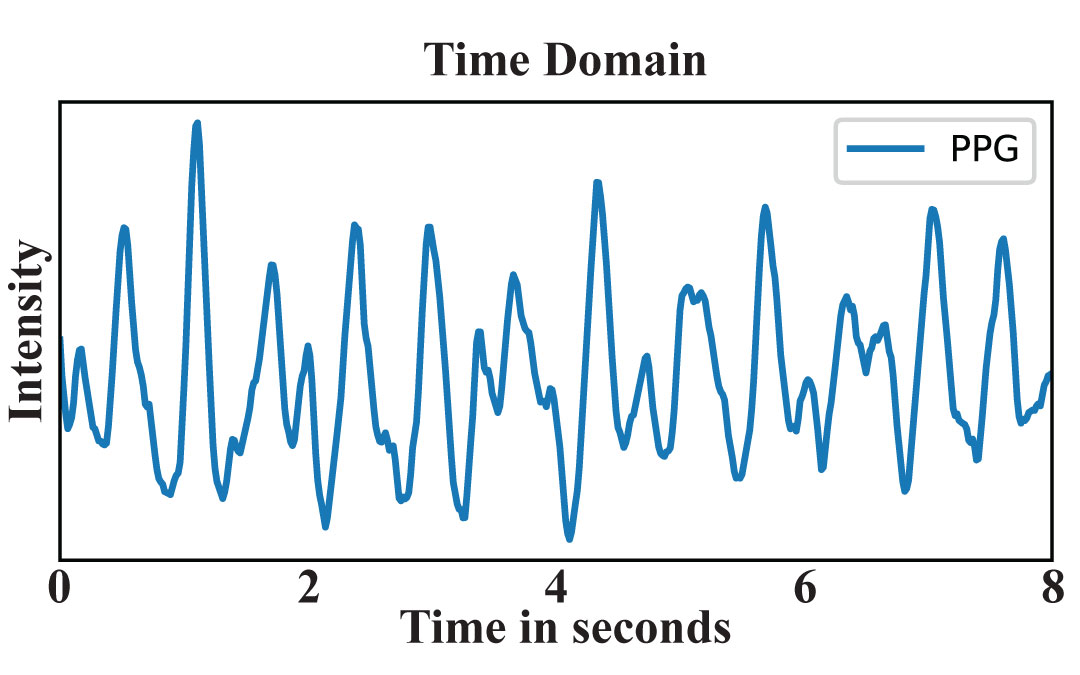
WildPPG
Respiro
SympCam
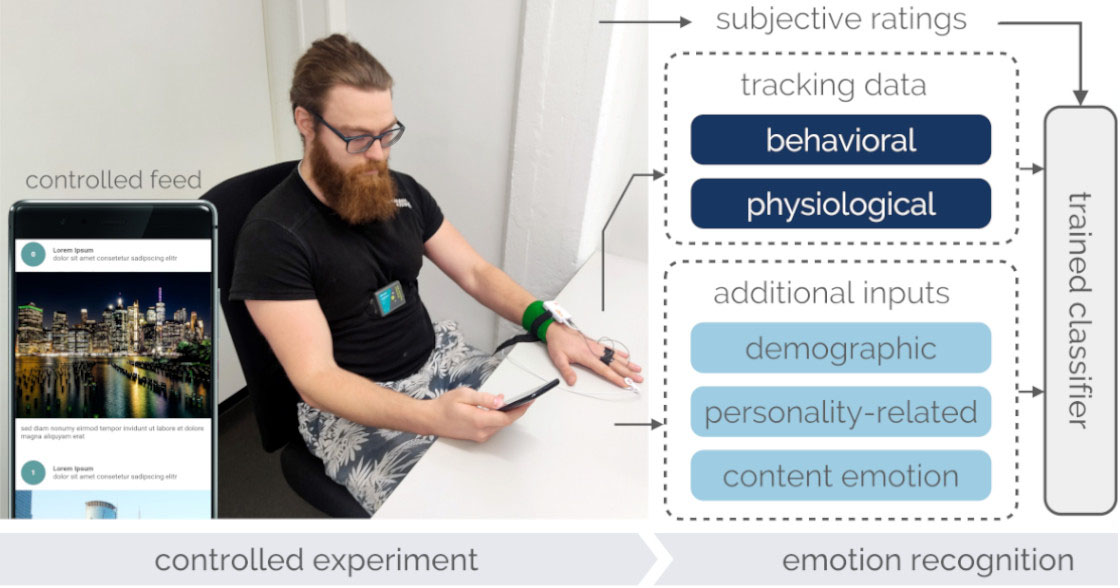
Emotion Recognition for Chatbots
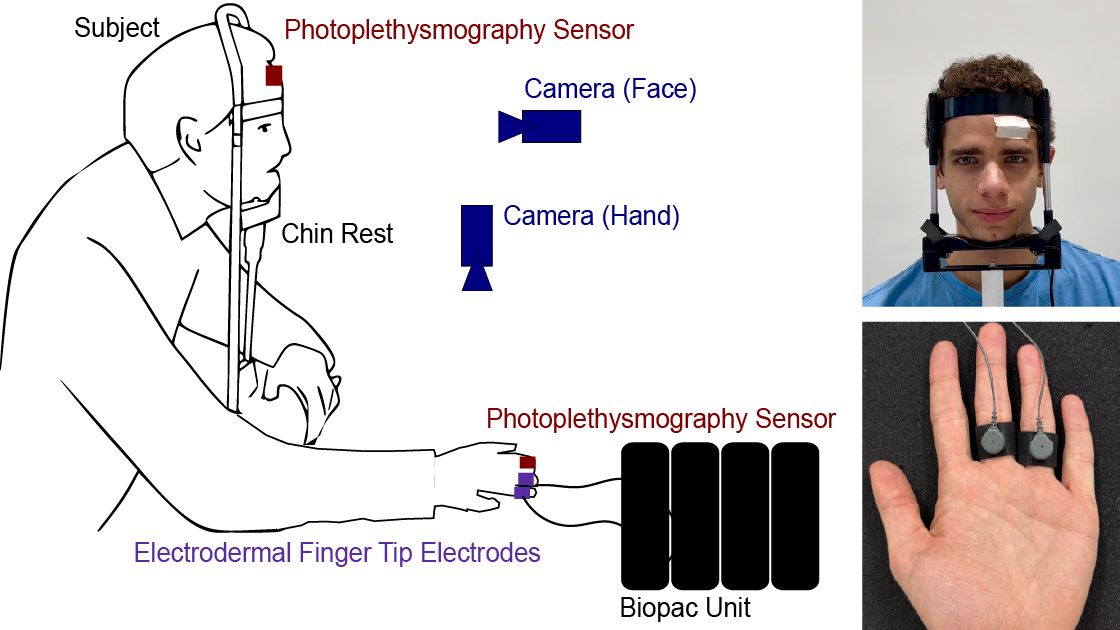
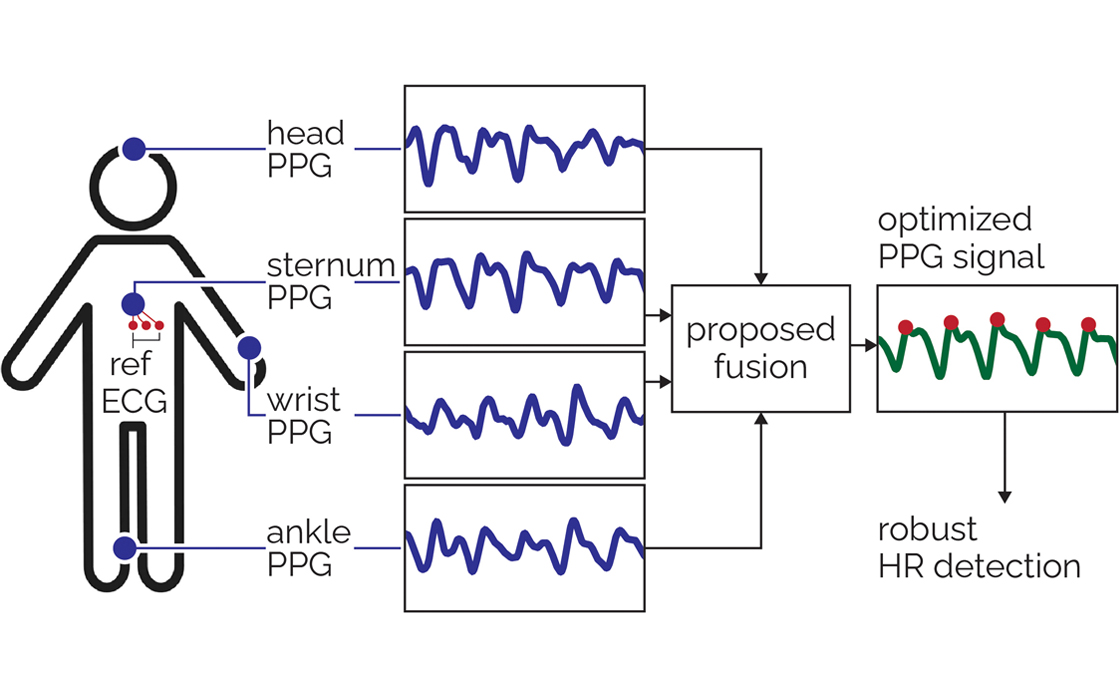
Tri-Spectral PPG
Multi-Site Photoplethysmography
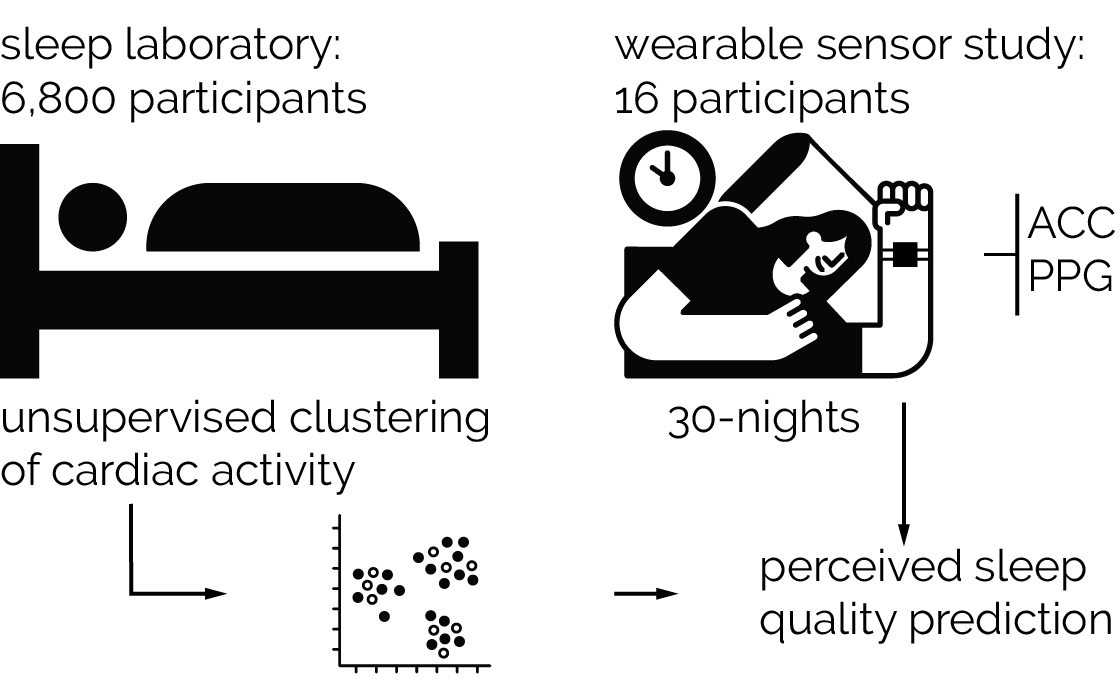
Unsupervised Sleep Quality Estimation
Predicting Perceived Sleep Quality
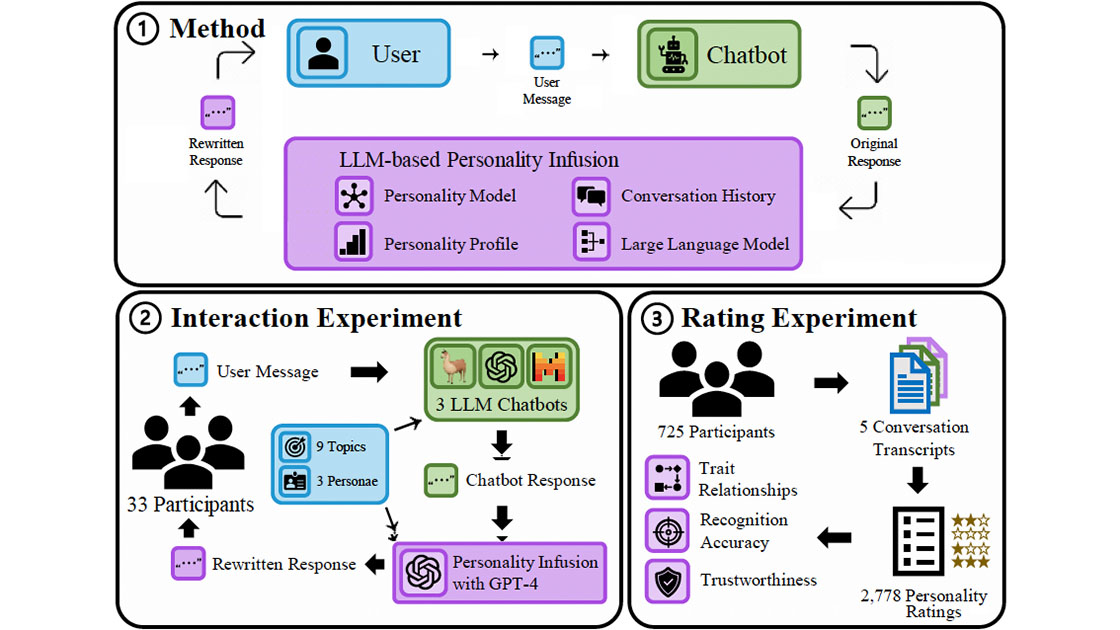
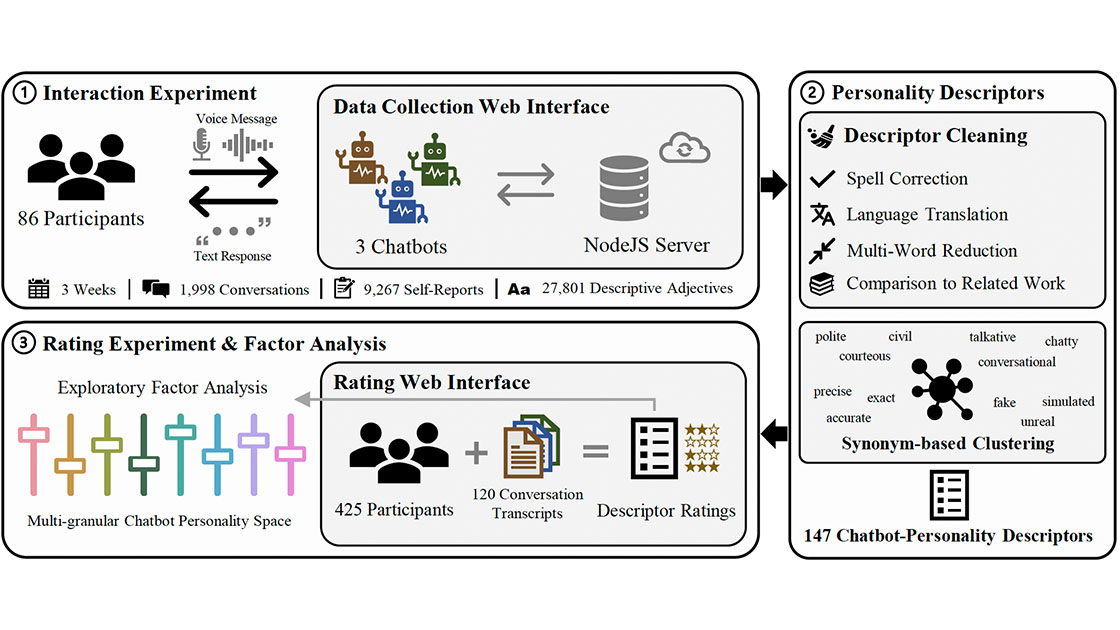
Chatbots With Attitude
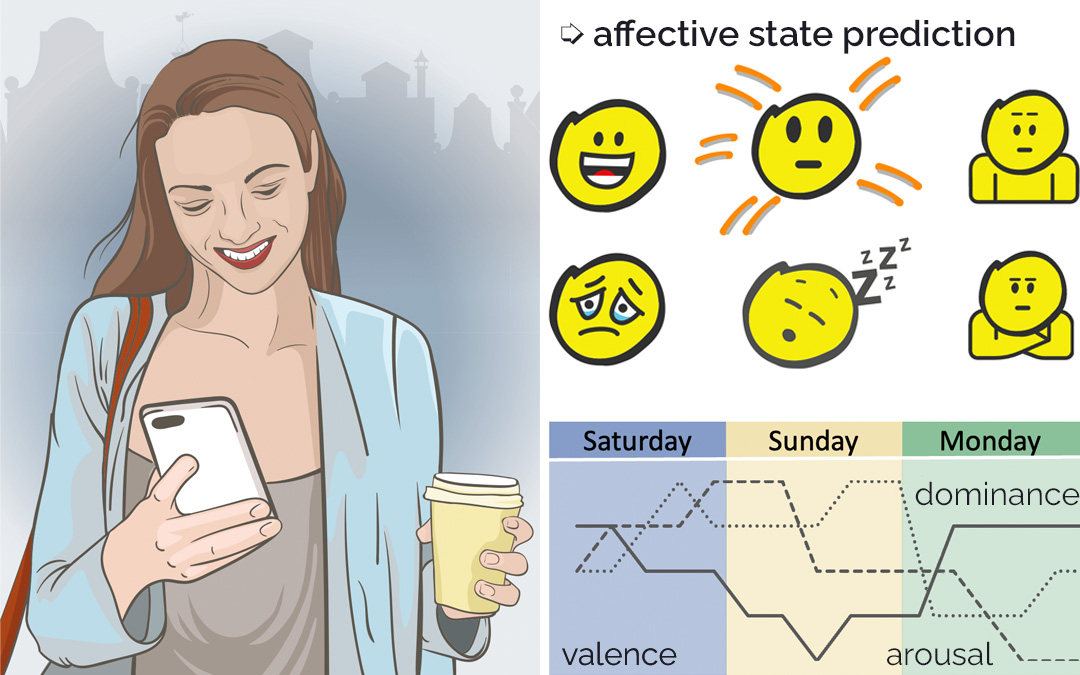
Detecting Users' Emotional States
GPT-3's Personality Dimensions
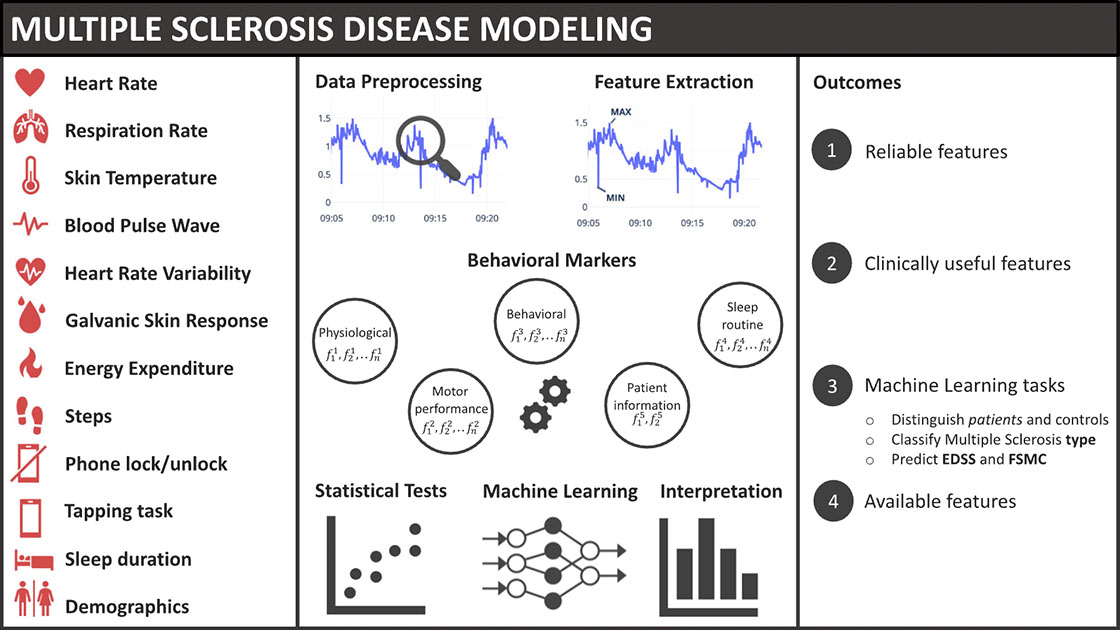
Modeling Multiple Sclerosis
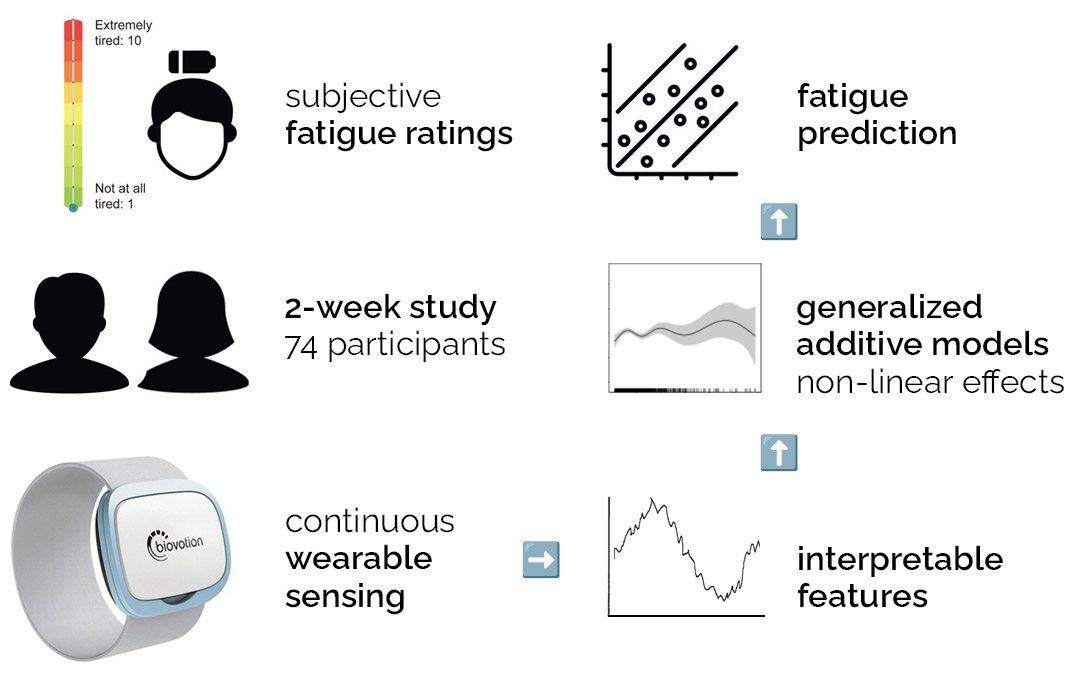
Biomarkers for daily fatigue
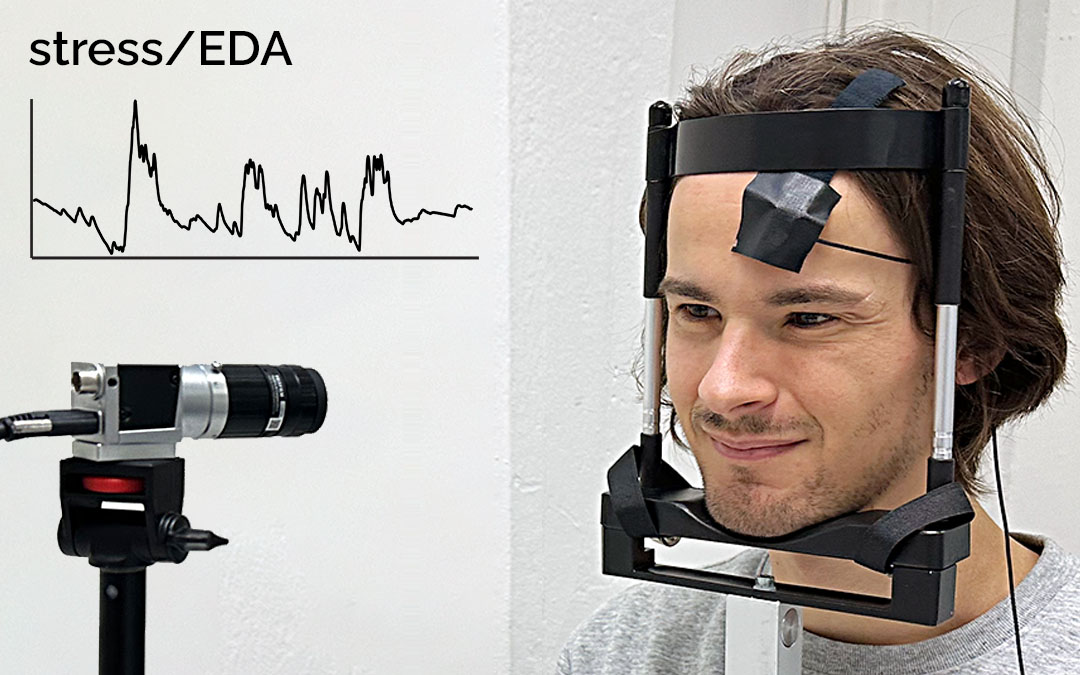
Video-based Sympathetic Arousal
BeliefPPG
Personality Trait Recognition in the Wild
SSVEP Visual Stimuations vs. User-Friendliness in Virtual Reality
Physiological Responses to Fear, Frustration, and Insight
Cognitive Fatigability Assessment Test
Autonomic dysfunction in Multiple Sclerosis
Affective State Prediction
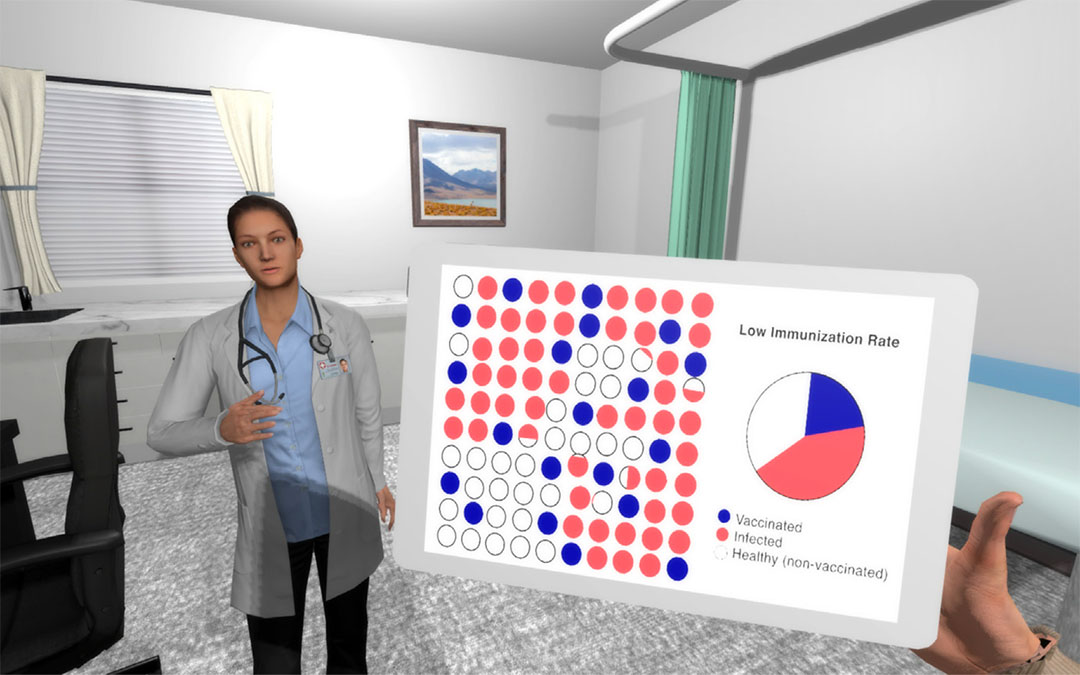
Virtual reality reduces COVID‑19 vaccine hesitancy
A self-administered virtual reality intervention increases COVID-19 vaccination intention
Predicting Fatigue from Fatigability
The Effect of Vibratory Stimuli
Assessing Fatigability in Multiple Sclerosis Patients
Naptics
Smartphone Pulse Oximetry
Glabella
DualBlink
Sensor ML
Machine learning methods for robust inference from sensor signals, time series, and multimodal observations.
Contimask
Learning Without Augmenting
Shifting the Paradigm
Unsupervised Periodicity Detection in Time Series
Quasi-periodic Data Augmentation